Naming and finding objects in photographs
We’ve all change into used to deep studying’s success in picture classification. Higher Swiss Mountain canine or Bernese mountain canine? Purple panda or large panda? No downside.
Nevertheless, in actual life it’s not sufficient to call the only most salient object on an image. Prefer it or not, some of the compelling examples is autonomous driving: We don’t need the algorithm to acknowledge simply that automotive in entrance of us, but in addition the pedestrian about to cross the road. And, simply detecting the pedestrian is just not ample. The precise location of objects issues.
The time period object detection is usually used to seek advice from the duty of naming and localizing a number of objects in a picture body. Object detection is tough; we’ll construct as much as it in a unfastened collection of posts, specializing in ideas as a substitute of aiming for final efficiency. At the moment, we’ll begin with just a few simple constructing blocks: Classification, each single and a number of; localization; and mixing each classification and localization of a single object.
Dataset
We’ll be utilizing photographs and annotations from the Pascal VOC dataset which will be downloaded from this mirror.
Particularly, we’ll use knowledge from the 2007 problem and the identical JSON annotation file as used within the quick.ai course.
Fast obtain/group directions, shamelessly taken from a helpful post on the fast.ai wiki, are as follows:
# mkdir knowledge && cd knowledge
# curl -OL http://pjreddie.com/media/information/VOCtrainval_06-Nov-2007.tar
# curl -OL https://storage.googleapis.com/coco-dataset/exterior/PASCAL_VOC.zip
# tar -xf VOCtrainval_06-Nov-2007.tar
# unzip PASCAL_VOC.zip
# mv PASCAL_VOC/*.json .
# rmdir PASCAL_VOC
# tar -xvf VOCtrainval_06-Nov-2007.tarIn phrases, we take the pictures and the annotation file from completely different locations:
Whether or not you’re executing the listed instructions or arranging information manually, it’s best to finally find yourself with directories/information analogous to those:
img_dir <- "knowledge/VOCdevkit/VOC2007/JPEGImages"
annot_file <- "knowledge/pascal_train2007.json"Now we have to extract some info from that json file.
Preprocessing
Let’s rapidly be sure that we have now all required libraries loaded.
Annotations comprise details about three varieties of issues we’re taken with.
annotations <- fromJSON(file = annot_file)
str(annotations, max.degree = 1)Checklist of 4
$ photographs :Checklist of 2501
$ sort : chr "situations"
$ annotations:Checklist of 7844
$ classes :Checklist of 20First, traits of the picture itself (peak and width) and the place it’s saved. Not surprisingly, right here it’s one entry per picture.
Then, object class ids and bounding field coordinates. There could also be a number of of those per picture.
In Pascal VOC, there are 20 object courses, from ubiquitous autos (automotive, aeroplane) over indispensable animals (cat, sheep) to extra uncommon (in well-liked datasets) sorts like potted plant or television monitor.
courses <- c(
"aeroplane",
"bicycle",
"hen",
"boat",
"bottle",
"bus",
"automotive",
"cat",
"chair",
"cow",
"diningtable",
"canine",
"horse",
"bike",
"individual",
"pottedplant",
"sheep",
"couch",
"practice",
"tvmonitor"
)
boxinfo <- annotations$annotations %>% {
tibble(
image_id = map_dbl(., "image_id"),
category_id = map_dbl(., "category_id"),
bbox = map(., "bbox")
)
}The bounding containers at the moment are saved in a listing column and have to be unpacked.
For the bounding containers, the annotation file supplies x_left and y_top coordinates, in addition to width and peak.
We are going to principally be working with nook coordinates, so we create the lacking x_right and y_bottom.
As regular in picture processing, the y axis begins from the highest.
Lastly, we nonetheless must match class ids to class names.
So, placing all of it collectively:
Notice that right here nonetheless, we have now a number of entries per picture, every annotated object occupying its personal row.
There’s one step that can bitterly damage our localization efficiency if we later overlook it, so let’s do it now already: We have to scale all bounding field coordinates in keeping with the precise picture measurement we’ll use once we move it to our community.
target_height <- 224
target_width <- 224
imageinfo <- imageinfo %>% mutate(
x_left_scaled = (x_left / image_width * target_width) %>% round(),
x_right_scaled = (x_right / image_width * target_width) %>% round(),
y_top_scaled = (y_top / image_height * target_height) %>% round(),
y_bottom_scaled = (y_bottom / image_height * target_height) %>% round(),
bbox_width_scaled = (bbox_width / image_width * target_width) %>% round(),
bbox_height_scaled = (bbox_height / image_height * target_height) %>% round()
)Let’s take a look at our knowledge. Choosing one of many early entries and displaying the unique picture along with the thing annotation yields
img_data <- imageinfo[4,]
img <- image_read(file.path(img_dir, img_data$file_name))
img <- image_draw(img)
rect(
img_data$x_left,
img_data$y_bottom,
img_data$x_right,
img_data$y_top,
border = "white",
lwd = 2
)
text(
img_data$x_left,
img_data$y_top,
img_data$identify,
offset = 1,
pos = 2,
cex = 1.5,
col = "white"
)
dev.off()
Now as indicated above, on this put up we’ll principally handle dealing with a single object in a picture. This implies we have now to determine, per picture, which object to single out.
An inexpensive technique appears to be selecting the thing with the most important floor fact bounding field.
After this operation, we solely have 2501 photographs to work with – not many in any respect! For classification, we might merely use knowledge augmentation as supplied by Keras, however to work with localization we’d need to spin our personal augmentation algorithm.
We’ll depart this to a later event and for now, deal with the fundamentals.
Lastly after train-test break up
train_indices <- sample(1:n_samples, 0.8 * n_samples)
train_data <- imageinfo_maxbb[train_indices,]
validation_data <- imageinfo_maxbb[-train_indices,]our coaching set consists of 2000 photographs with one annotation every. We’re prepared to start out coaching, and we’ll begin gently, with single-object classification.
Single-object classification
In all instances, we’ll use XCeption as a fundamental characteristic extractor. Having been educated on ImageNet, we don’t count on a lot tremendous tuning to be essential to adapt to Pascal VOC, so we depart XCeption’s weights untouched
and put just some customized layers on prime.
mannequin <- keras_model_sequential() %>%
feature_extractor %>%
layer_batch_normalization() %>%
layer_dropout(charge = 0.25) %>%
layer_dense(models = 512, activation = "relu") %>%
layer_batch_normalization() %>%
layer_dropout(charge = 0.5) %>%
layer_dense(models = 20, activation = "softmax")
mannequin %>% compile(
optimizer = "adam",
loss = "sparse_categorical_crossentropy",
metrics = list("accuracy")
)How ought to we move our knowledge to Keras? We might easy use Keras’ image_data_generator, however given we’ll want customized turbines quickly, we’ll construct a easy one ourselves.
This one delivers photographs in addition to the corresponding targets in a stream. Notice how the targets will not be one-hot-encoded, however integers – utilizing sparse_categorical_crossentropy as a loss perform allows this comfort.
batch_size <- 10
load_and_preprocess_image <- perform(image_name, target_height, target_width) {
img_array <- image_load(
file.path(img_dir, image_name),
target_size = c(target_height, target_width)
) %>%
image_to_array() %>%
xception_preprocess_input()
dim(img_array) <- c(1, dim(img_array))
img_array
}
classification_generator <-
perform(knowledge,
target_height,
target_width,
shuffle,
batch_size) {
i <- 1
perform() {
if (shuffle) {
indices <- sample(1:nrow(knowledge), measurement = batch_size)
} else {
if (i + batch_size >= nrow(knowledge))
i <<- 1
indices <- c(i:min(i + batch_size - 1, nrow(knowledge)))
i <<- i + length(indices)
}
x <-
array(0, dim = c(length(indices), target_height, target_width, 3))
y <- array(0, dim = c(length(indices), 1))
for (j in 1:length(indices)) {
x[j, , , ] <-
load_and_preprocess_image(knowledge[[indices[j], "file_name"]],
target_height, target_width)
y[j, ] <-
knowledge[[indices[j], "category_id"]] - 1
}
x <- x / 255
list(x, y)
}
}
train_gen <- classification_generator(
train_data,
target_height = target_height,
target_width = target_width,
shuffle = TRUE,
batch_size = batch_size
)
valid_gen <- classification_generator(
validation_data,
target_height = target_height,
target_width = target_width,
shuffle = FALSE,
batch_size = batch_size
)Now how does coaching go?
mannequin %>% fit_generator(
train_gen,
epochs = 20,
steps_per_epoch = nrow(train_data) / batch_size,
validation_data = valid_gen,
validation_steps = nrow(validation_data) / batch_size,
callbacks = list(
callback_model_checkpoint(
file.path("class_only", "weights.{epoch:02d}-{val_loss:.2f}.hdf5")
),
callback_early_stopping(persistence = 2)
)
)For us, after 8 epochs, accuracies on the practice resp. validation units have been at 0.68 and 0.74, respectively. Not too dangerous given given we’re attempting to distinguish between 20 courses right here.
Now let’s rapidly assume what we’d change if we have been to categorise a number of objects in a single picture. Modifications principally concern preprocessing steps.
A number of object classification
This time, we multi-hot-encode our knowledge. For each picture (as represented by its filename), right here we have now a vector of size 20 the place 0 signifies absence, 1 means presence of the respective object class:
image_cats <- imageinfo %>%
select(category_id) %>%
mutate(category_id = category_id - 1) %>%
pull() %>%
to_categorical(num_classes = 20)
image_cats <- data.frame(image_cats) %>%
add_column(file_name = imageinfo$file_name, .earlier than = TRUE)
image_cats <- image_cats %>%
group_by(file_name) %>%
summarise_all(.funs = funs(max))
n_samples <- nrow(image_cats)
train_indices <- sample(1:n_samples, 0.8 * n_samples)
train_data <- image_cats[train_indices,]
validation_data <- image_cats[-train_indices,]Correspondingly, we modify the generator to return a goal of dimensions batch_size * 20, as a substitute of batch_size * 1.
classification_generator <-
perform(knowledge,
target_height,
target_width,
shuffle,
batch_size) {
i <- 1
perform() {
if (shuffle) {
indices <- sample(1:nrow(knowledge), measurement = batch_size)
} else {
if (i + batch_size >= nrow(knowledge))
i <<- 1
indices <- c(i:min(i + batch_size - 1, nrow(knowledge)))
i <<- i + length(indices)
}
x <-
array(0, dim = c(length(indices), target_height, target_width, 3))
y <- array(0, dim = c(length(indices), 20))
for (j in 1:length(indices)) {
x[j, , , ] <-
load_and_preprocess_image(knowledge[[indices[j], "file_name"]],
target_height, target_width)
y[j, ] <-
knowledge[indices[j], 2:21] %>% as.matrix()
}
x <- x / 255
list(x, y)
}
}
train_gen <- classification_generator(
train_data,
target_height = target_height,
target_width = target_width,
shuffle = TRUE,
batch_size = batch_size
)
valid_gen <- classification_generator(
validation_data,
target_height = target_height,
target_width = target_width,
shuffle = FALSE,
batch_size = batch_size
)Now, essentially the most fascinating change is to the mannequin – despite the fact that it’s a change to 2 traces solely.
Had been we to make use of categorical_crossentropy now (the non-sparse variant of the above), mixed with a softmax activation, we’d successfully inform the mannequin to select only one, particularly, essentially the most possible object.
As an alternative, we need to determine: For every object class, is it current within the picture or not? Thus, as a substitute of softmax we use sigmoid, paired with binary_crossentropy, to acquire an impartial verdict on each class.
feature_extractor <-
application_xception(
include_top = FALSE,
input_shape = c(224, 224, 3),
pooling = "avg"
)
feature_extractor %>% freeze_weights()
mannequin <- keras_model_sequential() %>%
feature_extractor %>%
layer_batch_normalization() %>%
layer_dropout(charge = 0.25) %>%
layer_dense(models = 512, activation = "relu") %>%
layer_batch_normalization() %>%
layer_dropout(charge = 0.5) %>%
layer_dense(models = 20, activation = "sigmoid")
mannequin %>% compile(optimizer = "adam",
loss = "binary_crossentropy",
metrics = list("accuracy"))And at last, once more, we match the mannequin:
mannequin %>% fit_generator(
train_gen,
epochs = 20,
steps_per_epoch = nrow(train_data) / batch_size,
validation_data = valid_gen,
validation_steps = nrow(validation_data) / batch_size,
callbacks = list(
callback_model_checkpoint(
file.path("multiclass", "weights.{epoch:02d}-{val_loss:.2f}.hdf5")
),
callback_early_stopping(persistence = 2)
)
)This time, (binary) accuracy surpasses 0.95 after one epoch already, on each the practice and validation units. Not surprisingly, accuracy is considerably greater right here than once we needed to single out one in all 20 courses (and that, with different confounding objects current generally!).
Now, likelihood is that in case you’ve executed any deep studying earlier than, you’ve executed picture classification in some kind, maybe even within the multiple-object variant. To construct up within the course of object detection, it’s time we add a brand new ingredient: localization.
Single-object localization
From right here on, we’re again to coping with a single object per picture. So the query now could be, how will we study bounding containers?
For those who’ve by no means heard of this, the reply will sound unbelievably easy (naive even): We formulate this as a regression downside and purpose to foretell the precise coordinates. To set sensible expectations – we certainly shouldn’t count on final precision right here. However in a approach it’s superb it does even work in any respect.
What does this imply, formulate as a regression downside? Concretely, it means we’ll have a dense output layer with 4 models, every similar to a nook coordinate.
So let’s begin with the mannequin this time. Once more, we use Xception, however there’s an essential distinction right here: Whereas earlier than, we mentioned pooling = "avg" to acquire an output tensor of dimensions batch_size * variety of filters, right here we don’t do any averaging or flattening out of the spatial grid. It is because it’s precisely the spatial info we’re taken with!
For Xception, the output decision will probably be 7×7. So a priori, we shouldn’t count on excessive precision on objects a lot smaller than about 32×32 pixels (assuming the usual enter measurement of 224×224).
Now we append our customized regression module.
We are going to practice with one of many loss features widespread in regression duties, imply absolute error. However in duties like object detection or segmentation, we’re additionally taken with a extra tangible amount: How a lot do estimate and floor fact overlap?
Overlap is often measured as Intersection over Union, or Jaccard distance. Intersection over Union is strictly what it says, a ratio between area shared by the objects and area occupied once we take them collectively.
To evaluate the mannequin’s progress, we will simply code this as a customized metric:
metric_iou <- perform(y_true, y_pred) {
# order is [x_left, y_top, x_right, y_bottom]
intersection_xmin <- k_maximum(y_true[ ,1], y_pred[ ,1])
intersection_ymin <- k_maximum(y_true[ ,2], y_pred[ ,2])
intersection_xmax <- k_minimum(y_true[ ,3], y_pred[ ,3])
intersection_ymax <- k_minimum(y_true[ ,4], y_pred[ ,4])
area_intersection <- (intersection_xmax - intersection_xmin) *
(intersection_ymax - intersection_ymin)
area_y <- (y_true[ ,3] - y_true[ ,1]) * (y_true[ ,4] - y_true[ ,2])
area_yhat <- (y_pred[ ,3] - y_pred[ ,1]) * (y_pred[ ,4] - y_pred[ ,2])
area_union <- area_y + area_yhat - area_intersection
iou <- area_intersection/area_union
k_mean(iou)
}Mannequin compilation then goes like
Now modify the generator to return bounding field coordinates as targets…
localization_generator <-
perform(knowledge,
target_height,
target_width,
shuffle,
batch_size) {
i <- 1
perform() {
if (shuffle) {
indices <- sample(1:nrow(knowledge), measurement = batch_size)
} else {
if (i + batch_size >= nrow(knowledge))
i <<- 1
indices <- c(i:min(i + batch_size - 1, nrow(knowledge)))
i <<- i + length(indices)
}
x <-
array(0, dim = c(length(indices), target_height, target_width, 3))
y <- array(0, dim = c(length(indices), 4))
for (j in 1:length(indices)) {
x[j, , , ] <-
load_and_preprocess_image(knowledge[[indices[j], "file_name"]],
target_height, target_width)
y[j, ] <-
knowledge[indices[j], c("x_left_scaled",
"y_top_scaled",
"x_right_scaled",
"y_bottom_scaled")] %>% as.matrix()
}
x <- x / 255
list(x, y)
}
}
train_gen <- localization_generator(
train_data,
target_height = target_height,
target_width = target_width,
shuffle = TRUE,
batch_size = batch_size
)
valid_gen <- localization_generator(
validation_data,
target_height = target_height,
target_width = target_width,
shuffle = FALSE,
batch_size = batch_size
)… and we’re able to go!
mannequin %>% fit_generator(
train_gen,
epochs = 20,
steps_per_epoch = nrow(train_data) / batch_size,
validation_data = valid_gen,
validation_steps = nrow(validation_data) / batch_size,
callbacks = list(
callback_model_checkpoint(
file.path("loc_only", "weights.{epoch:02d}-{val_loss:.2f}.hdf5")
),
callback_early_stopping(persistence = 2)
)
)After 8 epochs, IOU on each coaching and check units is round 0.35. This quantity doesn’t look too good. To study extra about how coaching went, we have to see some predictions. Right here’s a comfort perform that shows a picture, the bottom fact field of essentially the most salient object (as outlined above), and if given, class and bounding field predictions.
plot_image_with_boxes <- perform(file_name,
object_class,
field,
scaled = FALSE,
class_pred = NULL,
box_pred = NULL) {
img <- image_read(file.path(img_dir, file_name))
if(scaled) img <- image_resize(img, geometry = "224x224!")
img <- image_draw(img)
x_left <- field[1]
y_bottom <- field[2]
x_right <- field[3]
y_top <- field[4]
rect(
x_left,
y_bottom,
x_right,
y_top,
border = "cyan",
lwd = 2.5
)
text(
x_left,
y_top,
object_class,
offset = 1,
pos = 2,
cex = 1.5,
col = "cyan"
)
if (!is.null(box_pred))
rect(box_pred[1],
box_pred[2],
box_pred[3],
box_pred[4],
border = "yellow",
lwd = 2.5)
if (!is.null(class_pred))
text(
box_pred[1],
box_pred[2],
class_pred,
offset = 0,
pos = 4,
cex = 1.5,
col = "yellow")
dev.off()
img %>% image_write(paste0("preds_", file_name))
plot(img)
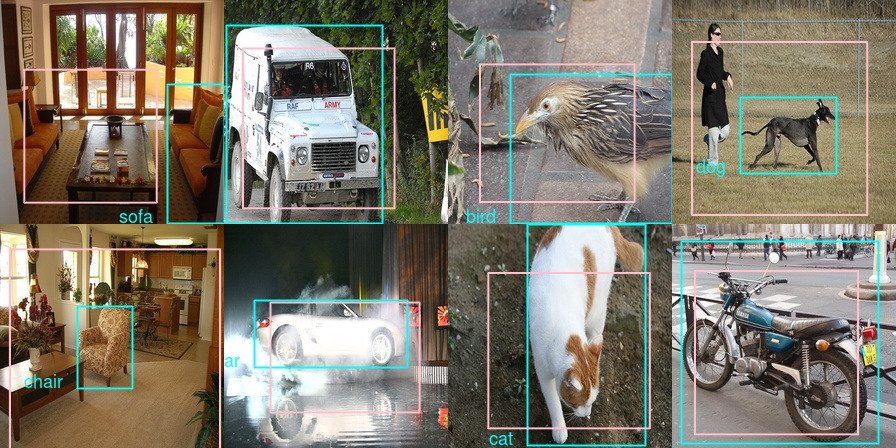
}First, let’s see predictions on pattern photographs from the coaching set.
train_1_8 <- train_data[1:8, c("file_name",
"name",
"x_left_scaled",
"y_top_scaled",
"x_right_scaled",
"y_bottom_scaled")]
for (i in 1:8) {
preds <-
mannequin %>% predict(
load_and_preprocess_image(train_1_8[i, "file_name"],
target_height, target_width),
batch_size = 1
)
plot_image_with_boxes(train_1_8$file_name[i],
train_1_8$identify[i],
train_1_8[i, 3:6] %>% as.matrix(),
scaled = TRUE,
box_pred = preds)
}
As you’d guess from wanting, the cyan-colored containers are the bottom fact ones. Now wanting on the predictions explains loads concerning the mediocre IOU values! Let’s take the very first pattern picture – we wished the mannequin to deal with the couch, but it surely picked the desk, which can also be a class within the dataset (though within the type of eating desk). Related with the picture on the proper of the primary row – we wished to it to select simply the canine but it surely included the individual, too (by far essentially the most continuously seen class within the dataset).
So we really made the duty much more tough than had we stayed with e.g., ImageNet the place usually a single object is salient.
Now test predictions on the validation set.

Once more, we get an analogous impression: The mannequin did study one thing, however the activity is unwell outlined. Take a look at the third picture in row 2: Isn’t it fairly consequent the mannequin picks all folks as a substitute of singling out some particular man?
If single-object localization is that simple, how technically concerned can it’s to output a category label on the similar time?
So long as we stick with a single object, the reply certainly is: not a lot.
Let’s end up at the moment with a constrained mixture of classification and localization: detection of a single object.
Single-object detection
Combining regression and classification into one means we’ll need to have two outputs in our mannequin.
We’ll thus use the useful API this time.
In any other case, there isn’t a lot new right here: We begin with an XCeption output of spatial decision 7×7, append some customized processing and return two outputs, one for bounding field regression and one for classification.
feature_extractor <- application_xception(
include_top = FALSE,
input_shape = c(224, 224, 3)
)
enter <- feature_extractor$enter
widespread <- feature_extractor$output %>%
layer_flatten(identify = "flatten") %>%
layer_activation_relu() %>%
layer_dropout(charge = 0.25) %>%
layer_dense(models = 512, activation = "relu") %>%
layer_batch_normalization() %>%
layer_dropout(charge = 0.5)
regression_output <-
layer_dense(widespread, models = 4, identify = "regression_output")
class_output <- layer_dense(
widespread,
models = 20,
activation = "softmax",
identify = "class_output"
)
mannequin <- keras_model(
inputs = enter,
outputs = list(regression_output, class_output)
)When defining the losses (imply absolute error and categorical crossentropy, simply as within the respective single duties of regression and classification), we might weight them in order that they find yourself on roughly a typical scale. In truth that didn’t make a lot of a distinction so we present the respective code in commented kind.
mannequin %>% freeze_weights(to = "flatten")
mannequin %>% compile(
optimizer = "adam",
loss = list("mae", "sparse_categorical_crossentropy"),
#loss_weights = checklist(
# regression_output = 0.05,
# class_output = 0.95),
metrics = list(
regression_output = custom_metric("iou", metric_iou),
class_output = "accuracy"
)
)Similar to mannequin outputs and losses are each lists, the information generator has to return the bottom fact samples in a listing.
Becoming the mannequin then goes as regular.
loc_class_generator <-
function(data,
target_height,
target_width,
shuffle,
batch_size) {
i <- 1
function() {
if (shuffle) {
indices <- sample(1:nrow(data), size = batch_size)
} else {
if (i + batch_size >= nrow(data))
i <<- 1
indices <- c(i:min(i + batch_size - 1, nrow(data)))
i <<- i + length(indices)
}
x <-
array(0, dim = c(length(indices), target_height, target_width, 3))
y1 <- array(0, dim = c(length(indices), 4))
y2 <- array(0, dim = c(length(indices), 1))
for (j in 1:length(indices)) {
x[j, , , ] <-
load_and_preprocess_image(data[[indices[j], "file_name"]],
target_height, target_width)
y1[j, ] <-
data[indices[j], c("x_left", "y_top", "x_right", "y_bottom")]
%>% as.matrix()
y2[j, ] <-
data[[indices[j], "category_id"]] - 1
}
x <- x / 255
list(x, list(y1, y2))
}
}
train_gen <- loc_class_generator(
train_data,
target_height = target_height,
target_width = target_width,
shuffle = TRUE,
batch_size = batch_size
)
valid_gen <- loc_class_generator(
validation_data,
target_height = target_height,
target_width = target_width,
shuffle = FALSE,
batch_size = batch_size
)
model %>% fit_generator(
train_gen,
epochs = 20,
steps_per_epoch = nrow(train_data) / batch_size,
validation_data = valid_gen,
validation_steps = nrow(validation_data) / batch_size,
callbacks = list(
callback_model_checkpoint(
file.path("loc_class", "weights.{epoch:02d}-{val_loss:.2f}.hdf5")
),
callback_early_stopping(patience = 2)
)
)What about model predictions? A priori we might expect the bounding boxes to look better than in the regression-only model, as a significant part of the model is shared between classification and localization. Intuitively, I should be able to more precisely indicate the boundaries of something if I have an idea what that something is.
Unfortunately, that didn’t quite happen. The model has become very biased to detecting a person everywhere, which might be advantageous (thinking safety) in an autonomous driving application but isn’t quite what we’d hoped for here.


Just to double-check this really has to do with class imbalance, here are the actual frequencies:
imageinfo %>% group_by(name)
%>% summarise(cnt = n())
%>% arrange(desc(cnt))# A tibble: 20 x 2
name cnt
<chr> <int>
1 person 2705
2 car 826
3 chair 726
4 bottle 338
5 pottedplant 305
6 bird 294
7 dog 271
8 sofa 218
9 boat 208
10 horse 207
11 bicycle 202
12 motorbike 193
13 cat 191
14 sheep 191
15 tvmonitor 191
16 cow 185
17 train 158
18 aeroplane 156
19 diningtable 148
20 bus 131To get better performance, we’d need to find a successful way to deal with this. However, handling class imbalance in deep learning is a topic of its own, and here we want to build up in the direction of objection detection. So we’ll make a cut here and in an upcoming post, think about how we can classify and localize multiple objects in an image.
Conclusion
We have seen that single-object classification and localization are conceptually straightforward. The big question now is, are these approaches extensible to multiple objects? Or will new ideas have to come in? We’ll follow up on this giving a short overview of approaches and then, singling in on one of those and implementing it.