Posit AI Weblog: Classifying pictures with torch
In current posts, we’ve been exploring important torch performance: tensors, the sine qua non of each deep studying framework; autograd, torch’s implementation of reverse-mode automated differentiation; modules, composable constructing blocks of neural networks; and optimizers, the – properly – optimization algorithms that torch gives.
However we haven’t actually had our “hey world” second but, at the least not if by “hey world” you imply the inevitable deep studying expertise of classifying pets. Cat or canine? Beagle or boxer? Chinook or Chihuahua? We’ll distinguish ourselves by asking a (barely) totally different query: What sort of hen?
Matters we’ll deal with on our approach:
-
The core roles of
torchdatasets and information loaders, respectively. -
How one can apply
remodels, each for picture preprocessing and information augmentation. -
How one can use Resnet (He et al. 2015), a pre-trained mannequin that comes with
torchvision, for switch studying. -
How one can use studying price schedulers, and specifically, the one-cycle studying price algorithm [@abs-1708-07120].
-
How one can discover a good preliminary studying price.
For comfort, the code is accessible on Google Colaboratory – no copy-pasting required.
Knowledge loading and preprocessing
The instance dataset used right here is accessible on Kaggle.
Conveniently, it could be obtained utilizing torchdatasets, which makes use of pins for authentication, retrieval and storage. To allow pins to handle your Kaggle downloads, please observe the directions here.
This dataset could be very “clear,” in contrast to the pictures we could also be used to from, e.g., ImageNet. To assist with generalization, we introduce noise throughout coaching – in different phrases, we carry out information augmentation. In torchvision, information augmentation is a part of an picture processing pipeline that first converts a picture to a tensor, after which applies any transformations corresponding to resizing, cropping, normalization, or varied types of distorsion.
Under are the transformations carried out on the coaching set. Word how most of them are for information augmentation, whereas normalization is finished to adjust to what’s anticipated by ResNet.
Picture preprocessing pipeline
library(torch)
library(torchvision)
library(torchdatasets)
library(dplyr)
library(pins)
library(ggplot2)
machine <- if (cuda_is_available()) torch_device("cuda:0") else "cpu"
train_transforms <- perform(img) {
img %>%
# first convert picture to tensor
transform_to_tensor() %>%
# then transfer to the GPU (if accessible)
(perform(x) x$to(machine = machine)) %>%
# information augmentation
transform_random_resized_crop(measurement = c(224, 224)) %>%
# information augmentation
transform_color_jitter() %>%
# information augmentation
transform_random_horizontal_flip() %>%
# normalize in accordance to what's anticipated by resnet
transform_normalize(imply = c(0.485, 0.456, 0.406), std = c(0.229, 0.224, 0.225))
}On the validation set, we don’t wish to introduce noise, however nonetheless have to resize, crop, and normalize the pictures. The check set needs to be handled identically.
And now, let’s get the information, properly divided into coaching, validation and check units. Moreover, we inform the corresponding R objects what transformations they’re anticipated to use:
train_ds <- bird_species_dataset("information", obtain = TRUE, remodel = train_transforms)
valid_ds <- bird_species_dataset("information", break up = "legitimate", remodel = valid_transforms)
test_ds <- bird_species_dataset("information", break up = "check", remodel = test_transforms)Two issues to notice. First, transformations are a part of the dataset idea, versus the information loader we’ll encounter shortly. Second, let’s check out how the pictures have been saved on disk. The general listing construction (ranging from information, which we specified as the basis listing for use) is that this:
information/bird_species/practice
information/bird_species/legitimate
information/bird_species/checkWithin the practice, legitimate, and check directories, totally different courses of pictures reside in their very own folders. For instance, right here is the listing format for the primary three courses within the check set:
information/bird_species/check/ALBATROSS/
- information/bird_species/check/ALBATROSS/1.jpg
- information/bird_species/check/ALBATROSS/2.jpg
- information/bird_species/check/ALBATROSS/3.jpg
- information/bird_species/check/ALBATROSS/4.jpg
- information/bird_species/check/ALBATROSS/5.jpg
information/check/'ALEXANDRINE PARAKEET'/
- information/bird_species/check/'ALEXANDRINE PARAKEET'/1.jpg
- information/bird_species/check/'ALEXANDRINE PARAKEET'/2.jpg
- information/bird_species/check/'ALEXANDRINE PARAKEET'/3.jpg
- information/bird_species/check/'ALEXANDRINE PARAKEET'/4.jpg
- information/bird_species/check/'ALEXANDRINE PARAKEET'/5.jpg
information/check/'AMERICAN BITTERN'/
- information/bird_species/check/'AMERICAN BITTERN'/1.jpg
- information/bird_species/check/'AMERICAN BITTERN'/2.jpg
- information/bird_species/check/'AMERICAN BITTERN'/3.jpg
- information/bird_species/check/'AMERICAN BITTERN'/4.jpg
- information/bird_species/check/'AMERICAN BITTERN'/5.jpgThat is precisely the type of format anticipated by torchs image_folder_dataset() – and actually bird_species_dataset() instantiates a subtype of this class. Had we downloaded the information manually, respecting the required listing construction, we may have created the datasets like so:
# e.g.
train_ds <- image_folder_dataset(
file.path(data_dir, "practice"),
remodel = train_transforms)Now that we bought the information, let’s see what number of gadgets there are in every set.
train_ds$.size()
valid_ds$.size()
test_ds$.size()31316
1125
1125That coaching set is admittedly large! It’s thus advisable to run this on GPU, or simply mess around with the supplied Colab pocket book.
With so many samples, we’re curious what number of courses there are.
class_names <- test_ds$courses
length(class_names)225So we do have a considerable coaching set, however the job is formidable as properly: We’re going to inform aside a minimum of 225 totally different hen species.
Knowledge loaders
Whereas datasets know what to do with every single merchandise, information loaders know easy methods to deal with them collectively. What number of samples make up a batch? Will we wish to feed them in the identical order all the time, or as an alternative, have a special order chosen for each epoch?
batch_size <- 64
train_dl <- dataloader(train_ds, batch_size = batch_size, shuffle = TRUE)
valid_dl <- dataloader(valid_ds, batch_size = batch_size)
test_dl <- dataloader(test_ds, batch_size = batch_size)Knowledge loaders, too, could also be queried for his or her size. Now size means: What number of batches?
train_dl$.size()
valid_dl$.size()
test_dl$.size() 490
18
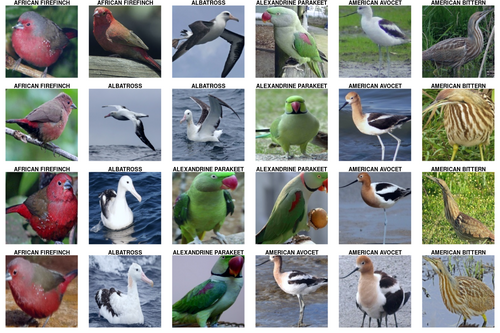
18Some birds
Subsequent, let’s view just a few pictures from the check set. We are able to retrieve the primary batch – pictures and corresponding courses – by creating an iterator from the dataloader and calling subsequent() on it:
# for show functions, right here we are literally utilizing a batch_size of 24
batch <- train_dl$.iter()$.subsequent()batch is a listing, the primary merchandise being the picture tensors:
[1] 24 3 224 224And the second, the courses:
[1] 24Courses are coded as integers, for use as indices in a vector of sophistication names. We’ll use these for labeling the pictures.
courses <- batch[[2]]
coursestorch_tensor
1
1
1
1
1
2
2
2
2
2
3
3
3
3
3
4
4
4
4
4
5
5
5
5
[ GPULongType{24} ]The picture tensors have form batch_size x num_channels x peak x width. For plotting utilizing as.raster(), we have to reshape the pictures such that channels come final. We additionally undo the normalization utilized by the dataloader.
Listed below are the primary twenty-four pictures:
library(dplyr)
pictures <- as_array(batch[[1]]) %>% aperm(perm = c(1, 3, 4, 2))
imply <- c(0.485, 0.456, 0.406)
std <- c(0.229, 0.224, 0.225)
pictures <- std * pictures + imply
pictures <- pictures * 255
pictures[images > 255] <- 255
pictures[images < 0] <- 0
par(mfcol = c(4,6), mar = rep(1, 4))
pictures %>%
purrr::array_tree(1) %>%
purrr::set_names(class_names[as_array(classes)]) %>%
purrr::map(as.raster, max = 255) %>%
purrr::iwalk(~{plot(.x); title(.y)})
Mannequin
The spine of our mannequin is a pre-trained occasion of ResNet.
mannequin <- model_resnet18(pretrained = TRUE)However we wish to distinguish amongst our 225 hen species, whereas ResNet was educated on 1000 totally different courses. What can we do? We merely exchange the output layer.
The brand new output layer can be the one one whose weights we’re going to practice – leaving all different ResNet parameters the way in which they’re. Technically, we may carry out backpropagation by the entire mannequin, striving to fine-tune ResNet’s weights as properly. Nevertheless, this may decelerate coaching considerably. The truth is, the selection will not be all-or-none: It’s as much as us how lots of the authentic parameters to maintain fastened, and what number of to “let out” for effective tuning. For the duty at hand, we’ll be content material to simply practice the newly added output layer: With the abundance of animals, together with birds, in ImageNet, we count on the educated ResNet to know quite a bit about them!
To interchange the output layer, the mannequin is modified in-place:
num_features <- mannequin$fc$in_features
mannequin$fc <- nn_linear(in_features = num_features, out_features = length(class_names))Now put the modified mannequin on the GPU (if accessible):
mannequin <- mannequin$to(machine = machine)Coaching
For optimization, we use cross entropy loss and stochastic gradient descent.
criterion <- nn_cross_entropy_loss()
optimizer <- optim_sgd(mannequin$parameters, lr = 0.1, momentum = 0.9)Discovering an optimally environment friendly studying price
We set the training price to 0.1, however that’s only a formality. As has develop into broadly recognized as a result of wonderful lectures by fast.ai, it is smart to spend a while upfront to find out an environment friendly studying price. Whereas out-of-the-box, torch doesn’t present a software like quick.ai’s studying price finder, the logic is simple to implement. Right here’s easy methods to discover a good studying price, as translated to R from Sylvain Gugger’s post:
# ported from: https://sgugger.github.io/how-do-you-find-a-good-learning-rate.html
losses <- c()
log_lrs <- c()
find_lr <- perform(init_value = 1e-8, final_value = 10, beta = 0.98) {
num <- train_dl$.size()
mult = (final_value/init_value)^(1/num)
lr <- init_value
optimizer$param_groups[[1]]$lr <- lr
avg_loss <- 0
best_loss <- 0
batch_num <- 0
coro::loop(for (b in train_dl) batch_num == 1) best_loss <- smoothed_loss
#Retailer the values
losses <<- c(losses, smoothed_loss)
log_lrs <<- c(log_lrs, (log(lr, 10)))
loss$backward()
optimizer$step()
#Replace the lr for the subsequent step
lr <- lr * mult
optimizer$param_groups[[1]]$lr <- lr
)
}
find_lr()
df <- data.frame(log_lrs = log_lrs, losses = losses)
ggplot(df, aes(log_lrs, losses)) + geom_point(measurement = 1) + theme_classic()
The most effective studying price will not be the precise one the place loss is at a minimal. As a substitute, it needs to be picked considerably earlier on the curve, whereas loss remains to be lowering. 0.05 seems to be like a good choice.
This worth is nothing however an anchor, nonetheless. Studying price schedulers enable studying charges to evolve based on some confirmed algorithm. Amongst others, torch implements one-cycle studying [@abs-1708-07120], cyclical studying charges (Smith 2015), and cosine annealing with heat restarts (Loshchilov and Hutter 2016).
Right here, we use lr_one_cycle(), passing in our newly discovered, optimally environment friendly, hopefully, worth 0.05 as a most studying price. lr_one_cycle() will begin with a low price, then regularly ramp up till it reaches the allowed most. After that, the training price will slowly, constantly lower, till it falls barely under its preliminary worth.
All this occurs not per epoch, however precisely as soon as, which is why the identify has one_cycle in it. Right here’s how the evolution of studying charges seems to be in our instance:

Earlier than we begin coaching, let’s rapidly re-initialize the mannequin, in order to start out from a clear slate:
mannequin <- model_resnet18(pretrained = TRUE)
mannequin$parameters %>% purrr::walk(perform(param) param$requires_grad_(FALSE))
num_features <- mannequin$fc$in_features
mannequin$fc <- nn_linear(in_features = num_features, out_features = length(class_names))
mannequin <- mannequin$to(machine = machine)
criterion <- nn_cross_entropy_loss()
optimizer <- optim_sgd(mannequin$parameters, lr = 0.05, momentum = 0.9)And instantiate the scheduler:
num_epochs = 10
scheduler <- optimizer %>%
lr_one_cycle(max_lr = 0.05, epochs = num_epochs, steps_per_epoch = train_dl$.size())Coaching loop
Now we practice for ten epochs. For each coaching batch, we name scheduler$step() to regulate the training price. Notably, this needs to be accomplished after optimizer$step().
train_batch <- perform(b) {
optimizer$zero_grad()
output <- mannequin(b[[1]])
loss <- criterion(output, b[[2]]$to(machine = machine))
loss$backward()
optimizer$step()
scheduler$step()
loss$merchandise()
}
valid_batch <- perform(b) {
output <- mannequin(b[[1]])
loss <- criterion(output, b[[2]]$to(machine = machine))
loss$merchandise()
}
for (epoch in 1:num_epochs) {
mannequin$practice()
train_losses <- c()
coro::loop(for (b in train_dl) {
loss <- train_batch(b)
train_losses <- c(train_losses, loss)
})
mannequin$eval()
valid_losses <- c()
coro::loop(for (b in valid_dl) {
loss <- valid_batch(b)
valid_losses <- c(valid_losses, loss)
})
cat(sprintf("nLoss at epoch %d: coaching: %3f, validation: %3fn", epoch, mean(train_losses), mean(valid_losses)))
}Loss at epoch 1: coaching: 2.662901, validation: 0.790769
Loss at epoch 2: coaching: 1.543315, validation: 1.014409
Loss at epoch 3: coaching: 1.376392, validation: 0.565186
Loss at epoch 4: coaching: 1.127091, validation: 0.575583
Loss at epoch 5: coaching: 0.916446, validation: 0.281600
Loss at epoch 6: coaching: 0.775241, validation: 0.215212
Loss at epoch 7: coaching: 0.639521, validation: 0.151283
Loss at epoch 8: coaching: 0.538825, validation: 0.106301
Loss at epoch 9: coaching: 0.407440, validation: 0.083270
Loss at epoch 10: coaching: 0.354659, validation: 0.080389It seems to be just like the mannequin made good progress, however we don’t but know something about classification accuracy in absolute phrases. We’ll verify that out on the check set.
Check set accuracy
Lastly, we calculate accuracy on the check set:
mannequin$eval()
test_batch <- perform(b) {
output <- mannequin(b[[1]])
labels <- b[[2]]$to(machine = machine)
loss <- criterion(output, labels)
test_losses <<- c(test_losses, loss$merchandise())
# torch_max returns a listing, with place 1 containing the values
# and place 2 containing the respective indices
predicted <- torch_max(output$information(), dim = 2)[[2]]
complete <<- complete + labels$measurement(1)
# add variety of appropriate classifications on this batch to the mixture
appropriate <<- appropriate + (predicted == labels)$sum()$merchandise()
}
test_losses <- c()
complete <- 0
appropriate <- 0
for (b in enumerate(test_dl)) {
test_batch(b)
}
mean(test_losses)[1] 0.03719test_accuracy <- appropriate/complete
test_accuracy[1] 0.98756A formidable outcome, given what number of totally different species there are!
Wrapup
Hopefully, this has been a helpful introduction to classifying pictures with torch, in addition to to its non-domain-specific architectural parts, like datasets, information loaders, and learning-rate schedulers. Future posts will discover different domains, in addition to transfer on past “hey world” in picture recognition. Thanks for studying!






