Time Collection Forecasting with Recurrent Neural Networks
Overview
On this put up, we’ll assessment three superior methods for enhancing the efficiency and generalization energy of recurrent neural networks. By the tip of the part, you’ll know most of what there may be to find out about utilizing recurrent networks with Keras. We’ll display all three ideas on a temperature-forecasting drawback, the place you might have entry to a time collection of knowledge factors coming from sensors put in on the roof of a constructing, corresponding to temperature, air stress, and humidity, which you utilize to foretell what the temperature can be 24 hours after the final information level. It is a pretty difficult drawback that exemplifies many frequent difficulties encountered when working with time collection.
We’ll cowl the next methods:
- Recurrent dropout — It is a particular, built-in method to make use of dropout to struggle overfitting in recurrent layers.
- Stacking recurrent layers — This will increase the representational energy of the community (at the price of increased computational hundreds).
- Bidirectional recurrent layers — These current the identical info to a recurrent community in numerous methods, rising accuracy and mitigating forgetting points.
A temperature-forecasting drawback
Till now, the one sequence information we’ve lined has been textual content information, such because the IMDB dataset and the Reuters dataset. However sequence information is discovered in lots of extra issues than simply language processing. In all of the examples on this part, you’ll play with a weather timeseries dataset recorded on the Climate Station on the Max Planck Institute for Biogeochemistry in Jena, Germany.
On this dataset, 14 completely different portions (such air temperature, atmospheric stress, humidity, wind route, and so forth) had been recorded each 10 minutes, over a number of years. The unique information goes again to 2003, however this instance is restricted to information from 2009–2016. This dataset is ideal for studying to work with numerical time collection. You’ll use it to construct a mannequin that takes as enter some information from the current previous (just a few days’ price of knowledge factors) and predicts the air temperature 24 hours sooner or later.
Obtain and uncompress the info as follows:
dir.create("~/Downloads/jena_climate", recursive = TRUE)
download.file(
"https://s3.amazonaws.com/keras-datasets/jena_climate_2009_2016.csv.zip",
"~/Downloads/jena_climate/jena_climate_2009_2016.csv.zip"
)
unzip(
"~/Downloads/jena_climate/jena_climate_2009_2016.csv.zip",
exdir = "~/Downloads/jena_climate"
)Let’s take a look at the info.
Observations: 420,551
Variables: 15
$ `Date Time` <chr> "01.01.2009 00:10:00", "01.01.2009 00:20:00", "...
$ `p (mbar)` <dbl> 996.52, 996.57, 996.53, 996.51, 996.51, 996.50,...
$ `T (degC)` <dbl> -8.02, -8.41, -8.51, -8.31, -8.27, -8.05, -7.62...
$ `Tpot (Ok)` <dbl> 265.40, 265.01, 264.91, 265.12, 265.15, 265.38,...
$ `Tdew (degC)` <dbl> -8.90, -9.28, -9.31, -9.07, -9.04, -8.78, -8.30...
$ `rh (%)` <dbl> 93.3, 93.4, 93.9, 94.2, 94.1, 94.4, 94.8, 94.4,...
$ `VPmax (mbar)` <dbl> 3.33, 3.23, 3.21, 3.26, 3.27, 3.33, 3.44, 3.44,...
$ `VPact (mbar)` <dbl> 3.11, 3.02, 3.01, 3.07, 3.08, 3.14, 3.26, 3.25,...
$ `VPdef (mbar)` <dbl> 0.22, 0.21, 0.20, 0.19, 0.19, 0.19, 0.18, 0.19,...
$ `sh (g/kg)` <dbl> 1.94, 1.89, 1.88, 1.92, 1.92, 1.96, 2.04, 2.03,...
$ `H2OC (mmol/mol)` <dbl> 3.12, 3.03, 3.02, 3.08, 3.09, 3.15, 3.27, 3.26,...
$ `rho (g/m**3)` <dbl> 1307.75, 1309.80, 1310.24, 1309.19, 1309.00, 13...
$ `wv (m/s)` <dbl> 1.03, 0.72, 0.19, 0.34, 0.32, 0.21, 0.18, 0.19,...
$ `max. wv (m/s)` <dbl> 1.75, 1.50, 0.63, 0.50, 0.63, 0.63, 0.63, 0.50,...
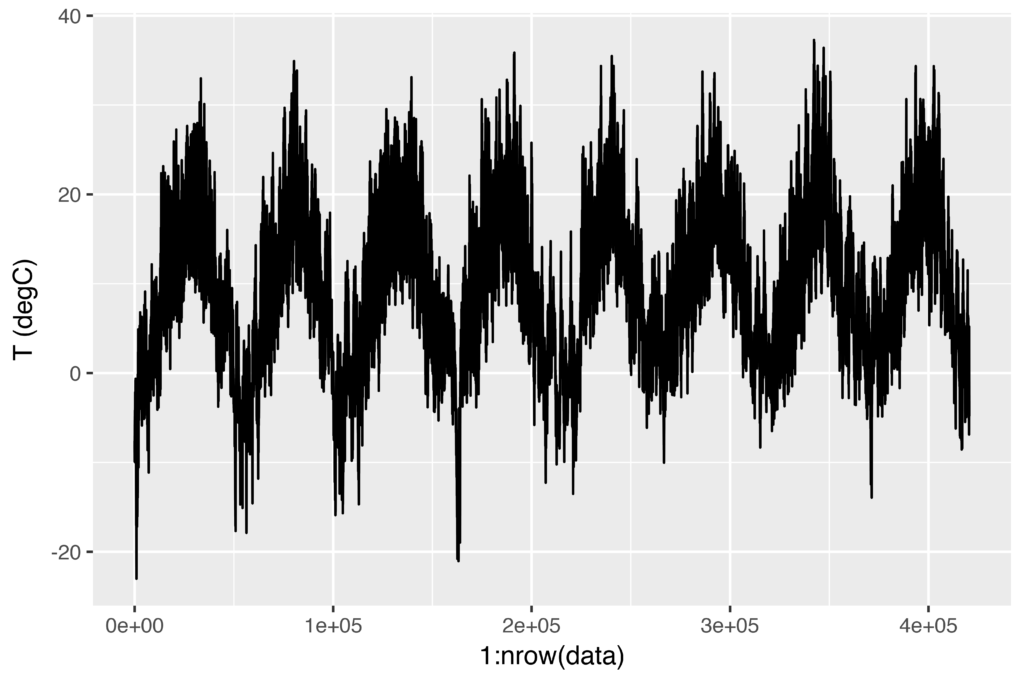
$ `wd (deg)` <dbl> 152.3, 136.1, 171.6, 198.0, 214.3, 192.7, 166.5...Right here is the plot of temperature (in levels Celsius) over time. On this plot, you’ll be able to clearly see the yearly periodicity of temperature.

Here’s a extra slender plot of the primary 10 days of temperature information (see determine 6.15). As a result of the info is recorded each 10 minutes, you get 144 information factors
per day.
ggplot(information[1:1440,], aes(x = 1:1440, y = `T (degC)`)) + geom_line()
On this plot, you’ll be able to see every day periodicity, particularly evident for the final 4 days. Additionally be aware that this 10-day interval have to be coming from a reasonably chilly winter month.
When you had been attempting to foretell common temperature for the following month given just a few months of previous information, the issue can be straightforward, as a result of dependable year-scale periodicity of the info. However trying on the information over a scale of days, the temperature appears much more chaotic. Is that this time collection predictable at a every day scale? Let’s discover out.
Getting ready the info
The precise formulation of the issue can be as follows: given information going way back to lookback timesteps (a timestep is 10 minutes) and sampled each steps timesteps, can you are expecting the temperature in delay timesteps? You’ll use the next parameter values:
lookback = 1440— Observations will return 10 days.steps = 6— Observations can be sampled at one information level per hour.delay = 144— Targets can be 24 hours sooner or later.
To get began, it’s essential to do two issues:
- Preprocess the info to a format a neural community can ingest. That is straightforward: the info is already numerical, so that you don’t must do any vectorization. However every time collection within the information is on a distinct scale (for instance, temperature is usually between -20 and +30, however atmospheric stress, measured in mbar, is round 1,000). You’ll normalize every time collection independently in order that all of them take small values on an identical scale.
- Write a generator perform that takes the present array of float information and yields batches of knowledge from the current previous, together with a goal temperature sooner or later. As a result of the samples within the dataset are extremely redundant (pattern N and pattern N + 1 can have most of their timesteps in frequent), it will be wasteful to explicitly allocate each pattern. As a substitute, you’ll generate the samples on the fly utilizing the unique information.
NOTE: Understanding generator features
A generator perform is a particular sort of perform that you simply name repeatedly to acquire a sequence of values from. Typically mills want to keep up inside state, so they’re usually constructed by calling one other one more perform which returns the generator perform (the atmosphere of the perform which returns the generator is then used to trace state).
For instance, the sequence_generator() perform under returns a generator perform that yields an infinite sequence of numbers:
sequence_generator <- perform(begin) {
worth <- begin - 1
perform() {
worth <<- worth + 1
worth
}
}
gen <- sequence_generator(10)
gen()[1] 10[1] 11The present state of the generator is the worth variable that’s outlined exterior of the perform. Notice that superassignment (<<-) is used to replace this state from inside the perform.
Generator features can sign completion by returning the worth NULL. Nevertheless, generator features handed to Keras coaching strategies (e.g. fit_generator()) ought to all the time return values infinitely (the variety of calls to the generator perform is managed by the epochs and steps_per_epoch parameters).
First, you’ll convert the R information body which we learn earlier right into a matrix of floating level values (we’ll discard the primary column which included a textual content timestamp):
You’ll then preprocess the info by subtracting the imply of every time collection and dividing by the usual deviation. You’re going to make use of the primary 200,000 timesteps as coaching information, so compute the imply and commonplace deviation for normalization solely on this fraction of the info.
The code for the info generator you’ll use is under. It yields an inventory (samples, targets), the place samples is one batch of enter information and targets is the corresponding array of goal temperatures. It takes the next arguments:
information— The unique array of floating-point information, which you normalized in itemizing 6.32.lookback— What number of timesteps again the enter information ought to go.delay— What number of timesteps sooner or later the goal needs to be.min_indexandmax_index— Indices within theinformationarray that delimit which timesteps to attract from. That is helpful for preserving a section of the info for validation and one other for testing.shuffle— Whether or not to shuffle the samples or draw them in chronological order.batch_size— The variety of samples per batch.step— The interval, in timesteps, at which you pattern information. You’ll set it 6 to be able to draw one information level each hour.
generator <- perform(information, lookback, delay, min_index, max_index,
shuffle = FALSE, batch_size = 128, step = 6) {
if (is.null(max_index))
max_index <- nrow(information) - delay - 1
i <- min_index + lookback
perform() {
if (shuffle) {
rows <- sample(c((min_index+lookback):max_index), measurement = batch_size)
} else {
if (i + batch_size >= max_index)
i <<- min_index + lookback
rows <- c(i:min(i+batch_size-1, max_index))
i <<- i + length(rows)
}
samples <- array(0, dim = c(length(rows),
lookback / step,
dim(information)[[-1]]))
targets <- array(0, dim = c(length(rows)))
for (j in 1:length(rows)) {
indices <- seq(rows[[j]] - lookback, rows[[j]]-1,
size.out = dim(samples)[[2]])
samples[j,,] <- information[indices,]
targets[[j]] <- information[rows[[j]] + delay,2]
}
list(samples, targets)
}
}The i variable accommodates the state that tracks subsequent window of knowledge to return, so it’s up to date utilizing superassignment (e.g. i <<- i + size(rows)).
Now, let’s use the summary generator perform to instantiate three mills: one for coaching, one for validation, and one for testing. Every will take a look at completely different temporal segments of the unique information: the coaching generator appears on the first 200,000 timesteps, the validation generator appears on the following 100,000, and the check generator appears on the the rest.
lookback <- 1440
step <- 6
delay <- 144
batch_size <- 128
train_gen <- generator(
information,
lookback = lookback,
delay = delay,
min_index = 1,
max_index = 200000,
shuffle = TRUE,
step = step,
batch_size = batch_size
)
val_gen = generator(
information,
lookback = lookback,
delay = delay,
min_index = 200001,
max_index = 300000,
step = step,
batch_size = batch_size
)
test_gen <- generator(
information,
lookback = lookback,
delay = delay,
min_index = 300001,
max_index = NULL,
step = step,
batch_size = batch_size
)
# What number of steps to attract from val_gen to be able to see your complete validation set
val_steps <- (300000 - 200001 - lookback) / batch_size
# What number of steps to attract from test_gen to be able to see your complete check set
test_steps <- (nrow(information) - 300001 - lookback) / batch_sizeA typical-sense, non-machine-learning baseline
Earlier than you begin utilizing black-box deep-learning fashions to unravel the temperature-prediction drawback, let’s strive a easy, common sense strategy. It can function a sanity test, and it’ll set up a baseline that you simply’ll need to beat to be able to display the usefulness of more-advanced machine-learning fashions. Such common sense baselines will be helpful if you’re approaching a brand new drawback for which there is no such thing as a identified resolution (but). A basic instance is that of unbalanced classification duties, the place some courses are way more frequent than others. In case your dataset accommodates 90% situations of sophistication A and 10% situations of sophistication B, then a common sense strategy to the classification job is to all the time predict “A” when introduced with a brand new pattern. Such a classifier is 90% correct total, and any learning-based strategy ought to due to this fact beat this 90% rating to be able to display usefulness. Generally, such elementary baselines can show surprisingly exhausting to beat.
On this case, the temperature time collection can safely be assumed to be steady (the temperatures tomorrow are more likely to be near the temperatures as we speak) in addition to periodical with a every day interval. Thus a common sense strategy is to all the time predict that the temperature 24 hours from now can be equal to the temperature proper now. Let’s consider this strategy, utilizing the imply absolute error (MAE) metric:
Right here’s the analysis loop.
This yields an MAE of 0.29. As a result of the temperature information has been normalized to be centered on 0 and have a typical deviation of 1, this quantity isn’t instantly interpretable. It interprets to a median absolute error of 0.29 x temperature_std levels Celsius: 2.57˚C.
celsius_mae <- 0.29 * std[[2]]That’s a pretty big common absolute error. Now the sport is to make use of your data of deep studying to do higher.
A primary machine-learning strategy
In the identical method that it’s helpful to determine a common sense baseline earlier than attempting machine-learning approaches, it’s helpful to strive easy, low-cost machine-learning fashions (corresponding to small, densely linked networks) earlier than trying into sophisticated and computationally costly fashions corresponding to RNNs. That is one of the best ways to verify any additional complexity you throw on the drawback is reliable and delivers actual advantages.
The next itemizing exhibits a completely linked mannequin that begins by flattening the info after which runs it by two dense layers. Notice the dearth of activation perform on the final dense layer, which is typical for a regression drawback. You utilize MAE because the loss. Since you consider on the very same information and with the very same metric you probably did with the common sense strategy, the outcomes can be immediately comparable.
library(keras)
mannequin <- keras_model_sequential() %>%
layer_flatten(input_shape = c(lookback / step, dim(information)[-1])) %>%
layer_dense(items = 32, activation = "relu") %>%
layer_dense(items = 1)
mannequin %>% compile(
optimizer = optimizer_rmsprop(),
loss = "mae"
)
historical past <- mannequin %>% fit_generator(
train_gen,
steps_per_epoch = 500,
epochs = 20,
validation_data = val_gen,
validation_steps = val_steps
)Let’s show the loss curves for validation and coaching.

A few of the validation losses are near the no-learning baseline, however not reliably. This goes to indicate the advantage of getting this baseline within the first place: it seems to be not straightforward to outperform. Your frequent sense accommodates a number of precious info {that a} machine-learning mannequin doesn’t have entry to.
You could surprise, if a easy, well-performing mannequin exists to go from the info to the targets (the common sense baseline), why doesn’t the mannequin you’re coaching discover it and enhance on it? As a result of this straightforward resolution isn’t what your coaching setup is in search of. The house of fashions through which you’re looking for an answer – that’s, your speculation house – is the house of all attainable two-layer networks with the configuration you outlined. These networks are already pretty sophisticated. While you’re in search of an answer with an area of sophisticated fashions, the straightforward, well-performing baseline could also be unlearnable, even when it’s technically a part of the speculation house. That may be a fairly vital limitation of machine studying usually: except the training algorithm is hardcoded to search for a selected sort of easy mannequin, parameter studying can typically fail to discover a easy resolution to a easy drawback.
A primary recurrent baseline
The primary absolutely linked strategy didn’t do effectively, however that doesn’t imply machine studying isn’t relevant to this drawback. The earlier strategy first flattened the time collection, which eliminated the notion of time from the enter information. Let’s as a substitute take a look at the info as what it’s: a sequence, the place causality and order matter. You’ll strive a recurrent-sequence processing mannequin – it needs to be the right match for such sequence information, exactly as a result of it exploits the temporal ordering of knowledge factors, not like the primary strategy.
As a substitute of the LSTM layer launched within the earlier part, you’ll use the GRU layer, developed by Chung et al. in 2014. Gated recurrent unit (GRU) layers work utilizing the identical precept as LSTM, however they’re considerably streamlined and thus cheaper to run (though they might not have as a lot representational energy as LSTM). This trade-off between computational expensiveness and representational energy is seen all over the place in machine studying.
mannequin <- keras_model_sequential() %>%
layer_gru(items = 32, input_shape = list(NULL, dim(information)[[-1]])) %>%
layer_dense(items = 1)
mannequin %>% compile(
optimizer = optimizer_rmsprop(),
loss = "mae"
)
historical past <- mannequin %>% fit_generator(
train_gen,
steps_per_epoch = 500,
epochs = 20,
validation_data = val_gen,
validation_steps = val_steps
)The outcomes are plotted under. Significantly better! You possibly can considerably beat the common sense baseline, demonstrating the worth of machine studying in addition to the prevalence of recurrent networks in comparison with sequence-flattening dense networks on any such job.

The brand new validation MAE of ~0.265 (earlier than you begin considerably overfitting) interprets to a imply absolute error of two.35˚C after denormalization. That’s a strong acquire on the preliminary error of two.57˚C, however you most likely nonetheless have a little bit of a margin for enchancment.
Utilizing recurrent dropout to struggle overfitting
It’s evident from the coaching and validation curves that the mannequin is overfitting: the coaching and validation losses begin to diverge significantly after just a few epochs. You’re already accustomed to a basic method for preventing this phenomenon: dropout, which randomly zeros out enter items of a layer to be able to break happenstance correlations within the coaching information that the layer is uncovered to. However the way to accurately apply dropout in recurrent networks isn’t a trivial query. It has lengthy been identified that making use of dropout earlier than a recurrent layer hinders studying slightly than serving to with regularization. In 2015, Yarin Gal, as a part of his PhD thesis on Bayesian deep studying, decided the right method to make use of dropout with a recurrent community: the identical dropout masks (the identical sample of dropped items) needs to be utilized at each timestep, as a substitute of a dropout masks that varies randomly from timestep to timestep. What’s extra, to be able to regularize the representations fashioned by the recurrent gates of layers corresponding to layer_gru and layer_lstm, a temporally fixed dropout masks needs to be utilized to the interior recurrent activations of the layer (a recurrent dropout masks). Utilizing the identical dropout masks at each timestep permits the community to correctly propagate its studying error by time; a temporally random dropout masks would disrupt this error sign and be dangerous to the training course of.
Yarin Gal did his analysis utilizing Keras and helped construct this mechanism immediately into Keras recurrent layers. Each recurrent layer in Keras has two dropout-related arguments: dropout, a float specifying the dropout charge for enter items of the layer, and recurrent_dropout, specifying the dropout charge of the recurrent items. Let’s add dropout and recurrent dropout to the layer_gru and see how doing so impacts overfitting. As a result of networks being regularized with dropout all the time take longer to totally converge, you’ll prepare the community for twice as many epochs.
mannequin <- keras_model_sequential() %>%
layer_gru(items = 32, dropout = 0.2, recurrent_dropout = 0.2,
input_shape = list(NULL, dim(information)[[-1]])) %>%
layer_dense(items = 1)
mannequin %>% compile(
optimizer = optimizer_rmsprop(),
loss = "mae"
)
historical past <- mannequin %>% fit_generator(
train_gen,
steps_per_epoch = 500,
epochs = 40,
validation_data = val_gen,
validation_steps = val_steps
)The plot under exhibits the outcomes. Success! You’re now not overfitting throughout the first 20 epochs. However though you might have extra steady analysis scores, your finest scores aren’t a lot decrease than they had been beforehand.

Stacking recurrent layers
Since you’re now not overfitting however appear to have hit a efficiency bottleneck, you need to think about rising the capability of the community. Recall the outline of the common machine-learning workflow: it’s usually a good suggestion to extend the capability of your community till overfitting turns into the first impediment (assuming you’re already taking primary steps to mitigate overfitting, corresponding to utilizing dropout). So long as you aren’t overfitting too badly, you’re seemingly beneath capability.
Growing community capability is usually achieved by rising the variety of items within the layers or including extra layers. Recurrent layer stacking is a basic method to construct more-powerful recurrent networks: for example, what at present powers the Google Translate algorithm is a stack of seven giant LSTM layers – that’s big.
To stack recurrent layers on prime of one another in Keras, all intermediate layers ought to return their full sequence of outputs (a 3D tensor) slightly than their output on the final timestep. That is achieved by specifying return_sequences = TRUE.
mannequin <- keras_model_sequential() %>%
layer_gru(items = 32,
dropout = 0.1,
recurrent_dropout = 0.5,
return_sequences = TRUE,
input_shape = list(NULL, dim(information)[[-1]])) %>%
layer_gru(items = 64, activation = "relu",
dropout = 0.1,
recurrent_dropout = 0.5) %>%
layer_dense(items = 1)
mannequin %>% compile(
optimizer = optimizer_rmsprop(),
loss = "mae"
)
historical past <- mannequin %>% fit_generator(
train_gen,
steps_per_epoch = 500,
epochs = 40,
validation_data = val_gen,
validation_steps = val_steps
)The determine under exhibits the outcomes. You possibly can see that the added layer does enhance the outcomes a bit, although not considerably. You possibly can draw two conclusions:
- Since you’re nonetheless not overfitting too badly, you could possibly safely improve the dimensions of your layers in a quest for validation-loss enchancment. This has a non-negligible computational value, although.
- Including a layer didn’t assist by a big issue, so you might be seeing diminishing returns from rising community capability at this level.

Utilizing bidirectional RNNs
The final method launched on this part known as bidirectional RNNs. A bidirectional RNN is a typical RNN variant that may provide higher efficiency than a daily RNN on sure duties. It’s often utilized in natural-language processing – you could possibly name it the Swiss Military knife of deep studying for natural-language processing.
RNNs are notably order dependent, or time dependent: they course of the timesteps of their enter sequences so as, and shuffling or reversing the timesteps can utterly change the representations the RNN extracts from the sequence. That is exactly the rationale they carry out effectively on issues the place order is significant, such because the temperature-forecasting drawback. A bidirectional RNN exploits the order sensitivity of RNNs: it consists of utilizing two common RNNs, such because the layer_gru and layer_lstm you’re already accustomed to, every of which processes the enter sequence in a single route (chronologically and antichronologically), after which merging their representations. By processing a sequence each methods, a bidirectional RNN can catch patterns which may be missed by a unidirectional RNN.
Remarkably, the truth that the RNN layers on this part have processed sequences in chronological order (older timesteps first) might have been an arbitrary choice. No less than, it’s a call we made no try to query thus far. Might the RNNs have carried out effectively sufficient in the event that they processed enter sequences in antichronological order, for example (newer timesteps first)? Let’s do that in apply and see what occurs. All it’s essential to do is write a variant of the info generator the place the enter sequences are reverted alongside the time dimension (change the final line with record(samples[,ncol(samples):1,], targets)). Coaching the identical one-GRU-layer community that you simply used within the first experiment on this part, you get the outcomes proven under.

The reversed-order GRU underperforms even the common sense baseline, indicating that on this case, chronological processing is necessary to the success of your strategy. This makes good sense: the underlying GRU layer will usually be higher at remembering the current previous than the distant previous, and naturally the newer climate information factors are extra predictive than older information factors for the issue (that’s what makes the common sense baseline pretty sturdy). Thus the chronological model of the layer is sure to outperform the reversed-order model. Importantly, this isn’t true for a lot of different issues, together with pure language: intuitively, the significance of a phrase in understanding a sentence isn’t often depending on its place within the sentence. Let’s strive the identical trick on the LSTM IMDB instance from part 6.2.
library(keras)
# Number of words to consider as features
max_features <- 10000
# Cuts off texts after this number of words
maxlen <- 500
imdb <- dataset_imdb(num_words = max_features)
c(c(x_train, y_train), c(x_test, y_test)) %<-% imdb
# Reverses sequences
x_train <- lapply(x_train, rev)
x_test <- lapply(x_test, rev)
# Pads sequences
x_train <- pad_sequences(x_train, maxlen = maxlen) <4>
x_test <- pad_sequences(x_test, maxlen = maxlen)
model <- keras_model_sequential() %>%
layer_embedding(input_dim = max_features, output_dim = 128) %>%
layer_lstm(units = 32) %>%
layer_dense(units = 1, activation = "sigmoid")
model %>% compile(
optimizer = "rmsprop",
loss = "binary_crossentropy",
metrics = c("acc")
)
history <- model %>% fit(
x_train, y_train,
epochs = 10,
batch_size = 128,
validation_split = 0.2
)You get performance nearly identical to that of the chronological-order LSTM. Remarkably, on such a text dataset, reversed-order processing works just as well as chronological processing, confirming the
hypothesis that, although word order does matter in understanding language, which order you use isn’t crucial. Importantly, an RNN trained on reversed sequences will learn different representations than one trained on the original sequences, much as you would have different mental models if time flowed backward in the real world – if you lived a life where you died on your first day and were born on your last day. In machine learning, representations that are different yet useful are always worth exploiting, and the more they differ, the better: they offer a new angle from which to look at your data, capturing aspects of the data that were missed by other approaches, and thus they can help boost performance on a task. This is the intuition behind ensembling, a concept we’ll explore in chapter 7.
A bidirectional RNN exploits this idea to improve on the performance of chronological-order RNNs. It looks at its input sequence both ways, obtaining potentially richer representations and capturing patterns that may have been missed by the chronological-order version alone.

To instantiate a bidirectional RNN in Keras, you use the bidirectional() function, which takes a recurrent layer instance as an argument. The bidirectional() function creates a second, separate instance of this recurrent layer and uses one instance for processing the input sequences in chronological order and the other instance for processing the input sequences in reversed order. Let’s try it on the IMDB sentiment-analysis task.
model <- keras_model_sequential() %>%
layer_embedding(input_dim = max_features, output_dim = 32) %>%
bidirectional(
layer_lstm(items = 32)
) %>%
layer_dense(items = 1, activation = "sigmoid")
mannequin %>% compile(
optimizer = "rmsprop",
loss = "binary_crossentropy",
metrics = c("acc")
)
historical past <- mannequin %>% match(
x_train, y_train,
epochs = 10,
batch_size = 128,
validation_split = 0.2
)It performs barely higher than the common LSTM you tried within the earlier part, reaching over 89% validation accuracy. It additionally appears to overfit extra shortly, which is unsurprising as a result of a bidirectional layer has twice as many parameters as a chronological LSTM. With some regularization, the bidirectional strategy would seemingly be a robust performer on this job.
Now let’s strive the identical strategy on the temperature prediction job.
mannequin <- keras_model_sequential() %>%
bidirectional(
layer_gru(items = 32), input_shape = list(NULL, dim(information)[[-1]])
) %>%
layer_dense(items = 1)
mannequin %>% compile(
optimizer = optimizer_rmsprop(),
loss = "mae"
)
historical past <- mannequin %>% fit_generator(
train_gen,
steps_per_epoch = 500,
epochs = 40,
validation_data = val_gen,
validation_steps = val_steps
)This performs about in addition to the common layer_gru. It’s straightforward to know why: all of the predictive capability should come from the chronological half of the community, as a result of the antichronological half is understood to be severely underperforming on this job (once more, as a result of the current previous issues way more than the distant previous on this case).
Going even additional
There are numerous different issues you could possibly strive, to be able to enhance efficiency on the temperature-forecasting drawback:
- Alter the variety of items in every recurrent layer within the stacked setup. The present selections are largely arbitrary and thus most likely suboptimal.
- Alter the training charge utilized by the
RMSpropoptimizer. - Strive utilizing
layer_lstmas a substitute oflayer_gru. - Strive utilizing an even bigger densely linked regressor on prime of the recurrent layers: that’s, an even bigger dense layer or perhaps a stack of dense layers.
- Don’t overlook to ultimately run the best-performing fashions (by way of validation MAE) on the check set! In any other case, you’ll develop architectures which are overfitting to the validation set.
As all the time, deep studying is extra an artwork than a science. We are able to present pointers that recommend what’s more likely to work or not work on a given drawback, however, in the end, each drawback is exclusive; you’ll have to judge completely different methods empirically. There’s at present no concept that can inform you upfront exactly what you need to do to optimally remedy an issue. You should iterate.
Wrapping up
Right here’s what you need to take away from this part:
- As you first realized in chapter 4, when approaching a brand new drawback, it’s good to first set up common sense baselines to your metric of alternative. When you don’t have a baseline to beat, you’ll be able to’t inform whether or not you’re making actual progress.
- Strive easy fashions earlier than costly ones, to justify the extra expense. Generally a easy mannequin will transform your best choice.
- When you might have information the place temporal ordering issues, recurrent networks are an important match and simply outperform fashions that first flatten the temporal information.
- To make use of dropout with recurrent networks, you need to use a time-constant dropout masks and recurrent dropout masks. These are constructed into Keras recurrent layers, so all it’s important to do is use the
dropoutandrecurrent_dropoutarguments of recurrent layers. - Stacked RNNs present extra representational energy than a single RNN layer. They’re additionally way more costly and thus not all the time price it. Though they provide clear positive aspects on advanced issues (corresponding to machine translation), they might not all the time be related to smaller, less complicated issues.
- Bidirectional RNNs, which take a look at a sequence each methods, are helpful on natural-language processing issues. However they aren’t sturdy performers on sequence information the place the current previous is way more informative than the start of the sequence.
NOTE: Markets and machine studying
Some readers are sure to need to take the methods we’ve launched right here and take a look at them on the issue of forecasting the longer term worth of securities on the inventory market (or foreign money change charges, and so forth). Markets have very completely different statistical traits than pure phenomena corresponding to climate patterns. Making an attempt to make use of machine studying to beat markets, if you solely have entry to publicly accessible information, is a troublesome endeavor, and also you’re more likely to waste your time and sources with nothing to indicate for it.
At all times keep in mind that in the case of markets, previous efficiency is not a very good predictor of future returns – trying within the rear-view mirror is a foul method to drive. Machine studying, alternatively, is relevant to datasets the place the previous is a very good predictor of the longer term.