3D Level Cloud Form Detection: Indoor Modelling Information
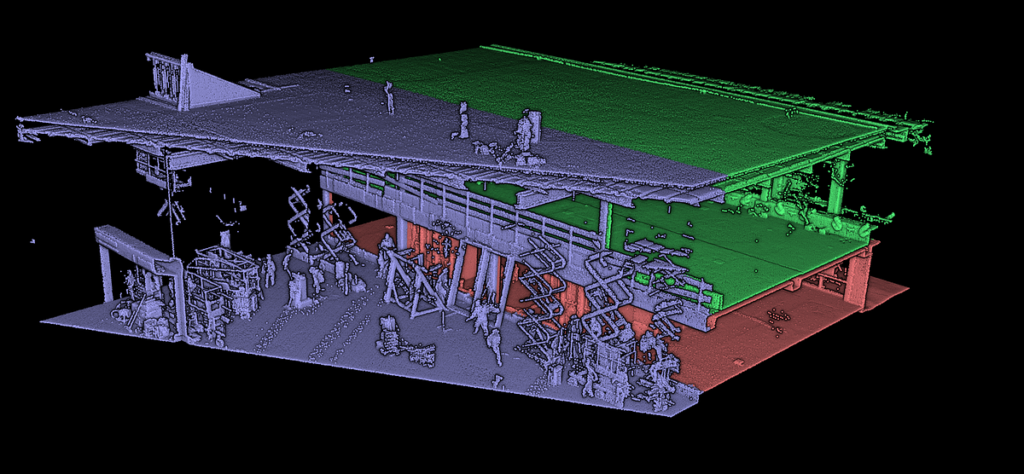
A ten-step Python Information to Automate 3D Form Detection, Segmentation, Clustering, and Voxelization for Area Occupancy 3D Modeling of Indoor Level Cloud Datasets.
When you’ve got expertise with level clouds or information evaluation, you know the way essential it’s to identify patterns. Recognizing information factors with related patterns, or “objects,” is vital to realize extra precious insights. Our visible cognitive system accomplishes this activity simply, however replicating this human capability via computational strategies is a major problem.
The objective is to make the most of the pure tendency of the human visible system to group units of parts. 👀

However why is it helpful?
First, it helps you to simply entry and work with particular components of the information by grouping them into segments. Secondly, it makes the information processing sooner by areas as a substitute of particular person factors. This will save quite a lot of time and power. And eventually, segmentation can assist you discover patterns and relationships you wouldn’t be capable of see simply by wanting on the uncooked information. 🔍 General, segmentation is essential for getting helpful info from level cloud information. If you’re not sure find out how to do it, don’t worry — We’ll determine this out collectively! 🤿
The Technique
Allow us to body the general method earlier than approaching the challenge with an environment friendly resolution. This tutorial follows a method comprising ten simple steps, as illustrated in our technique diagram under.

The technique is laid out, and under, you will discover the fast hyperlinks to the completely different steps:
Step 1. Setting Setup
Step 2. 3D Knowledge Preparation
Step 3. Knowledge Pre-Processing
Step 4. Parameter Setting
Step 5. RANSAC Planar Detection
Step 6. Multi-Order RANSAC
Step 7. Euclidean Clustering Refinement
Step 8. Voxelization Labelling
Step 9. Indoor Spatial Modelling
Step 10. 3D Workflow Export