This AI Analysis Paper Presents a Complete Survey of Deep Studying for Visible Localization and Mapping
If I ask you, “The place are you now?’” or “What do your environment seem like?” you’ll instantly be capable of reply owing to a novel potential referred to as multisensory notion in people that permits you to understand your movement and your surrounding surroundings guaranteeing you’ve got full spatial consciousness. However assume as if the identical query is posed to a robotic: how would it not method the problem?
The difficulty is that if this robotic doesn’t have a map, it can’t know the place it’s, and if it doesn’t know what its environment seem like, neither can it create a map. Primarily, making this a ‘who got here first, hen or egg?’ downside which within the machine studying world on this context is termed as a localization and mapping downside.
“Localization” is the aptitude to amass inside system data associated to a robotic’s movement, together with its place, orientation, and pace. However, “mapping” pertains to the power to understand exterior environmental circumstances, encompassing facets comparable to the form of the environment, their visible traits, and semantic attributes. These features can function independently, with one targeted on inside states and the opposite on exterior circumstances, or they will work collectively as a single system referred to as Simultaneous Localization and Mapping (SLAM).
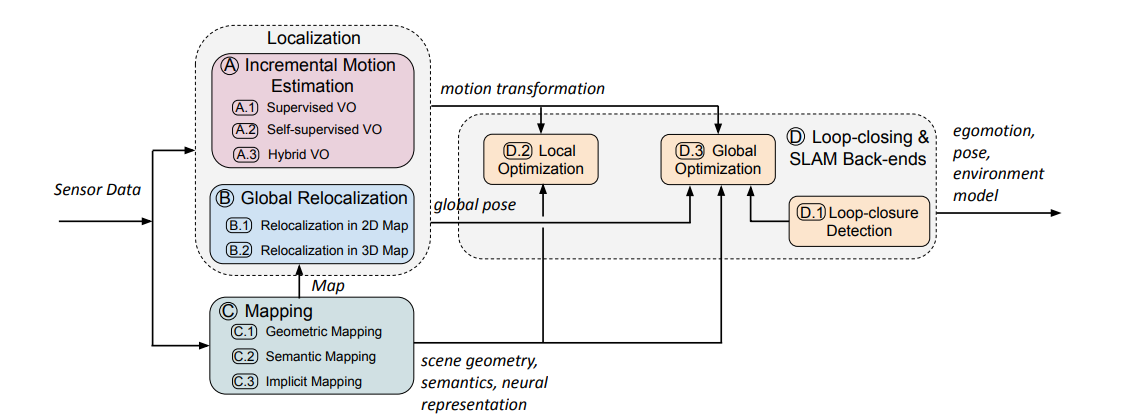
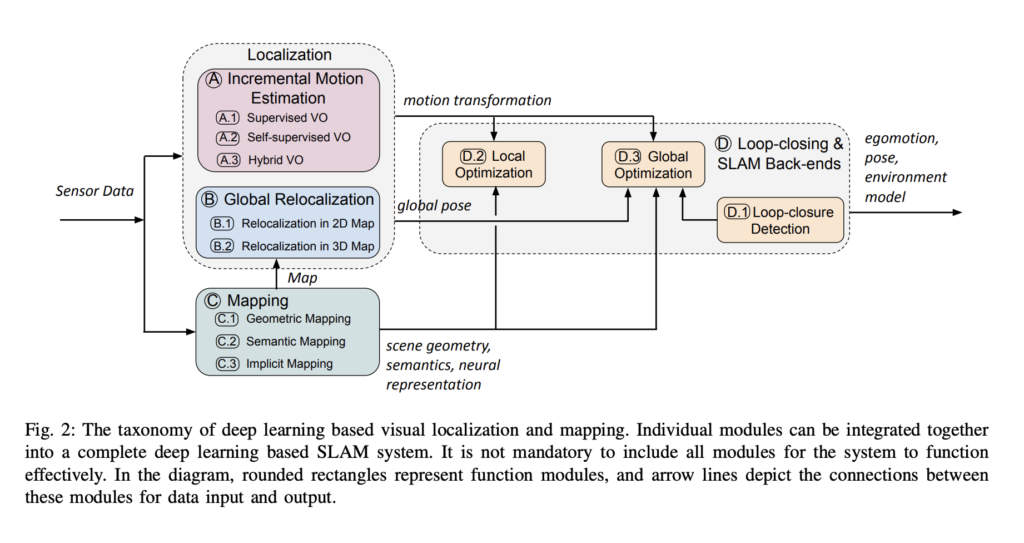
The prevailing challenges with algorithms comparable to image-based relocalization, visible odometry, and SLAM embody imperfect sensor measurements, dynamic scenes, hostile lighting circumstances, and real-world constraints that considerably hinder their sensible implementation. The picture above demonstrates how particular person modules could be built-in right into a deep learning-based SLAM system. This piece of analysis presents a complete survey on how deep learning-based approaches and conventional approaches and concurrently solutions two important questions:
- Is deep studying promising for visible localization and mapping?
Researchers imagine three properties listed under might make deep studying a novel route for a general-purpose SLAM system sooner or later.
- First, deep studying gives highly effective notion instruments that may be built-in into the visible SLAM entrance finish to extract options in difficult areas for odometry estimation or relocalization and supply dense depth for mapping.
- Second, deep studying empowers robots with superior comprehension and interplay capabilities. Neural networks excel at bridging summary ideas with human-understandable phrases, like labeling scene semantics inside a mapping or SLAM methods, that are usually difficult to explain utilizing formal mathematical strategies.
- Lastly, studying strategies permit SLAM methods or particular person localization/mapping algorithms to study from expertise and actively exploit new data for self-learning.
- How can deep studying be utilized to unravel the issue of visible localization and mapping?
- Deep studying is a flexible instrument for modeling varied facets of SLAM and particular person localization/mapping algorithms. As an example, it may be employed to create end-to-end neural community fashions that immediately estimate pose from photographs. It’s notably useful in dealing with difficult circumstances like featureless areas, dynamic lighting, and movement blur, the place standard modeling strategies could battle.
- Deep studying is used to unravel affiliation issues in SLAM. It aids in relocalization, semantic mapping, and loop-closure detection by connecting photographs to maps, labeling pixels semantically, and recognizing related scenes from earlier visits.
- Deep studying is leveraged to find options related to the duty of curiosity mechanically. By exploiting prior information, e.g., the geometry constraints, a self-learning framework can mechanically be arrange for SLAM to replace parameters based mostly on enter photographs.
It could be identified that deep studying strategies depend on giant, precisely labeled datasets to extract significant patterns however could have problem generalizing to unfamiliar environments. These fashions lack interpretability, typically functioning as black packing containers. Moreover, localization and mapping methods could be computationally intensive whereas extremely parallelizable until mannequin compression strategies are utilized.
Take a look at the Paper. All Credit score For This Analysis Goes To the Researchers on This Venture. Additionally, don’t neglect to hitch our 29k+ ML SubReddit, 40k+ Facebook Community, Discord Channel, and Email Newsletter, the place we share the most recent AI analysis information, cool AI tasks, and extra.
If you like our work, you will love our newsletter..
Janhavi Lande, is an Engineering Physics graduate from IIT Guwahati, class of 2023. She is an upcoming information scientist and has been working on this planet of ml/ai analysis for the previous two years. She is most fascinated by this ever altering world and its fixed demand of people to maintain up with it. In her pastime she enjoys touring, studying and writing poems.