Meet AnyLoc: The Newest Common Methodology For Visible Place Recognition (VPR)
As the sphere of Synthetic Intelligence is continually progressing, it has paved its means into quite a lot of use instances, together with robotics. Contemplating Visible Place Recognition (VPR) is a vital ability for estimating robotic standing and is broadly utilized in a wide range of robotic programs, reminiscent of wearable expertise, drones, autonomous automobiles, and ground-based robots. With the utilization of visible information, VPR permits robots to acknowledge and comprehend their present location or place inside their environment.
It has been tough to attain common utility for VPR throughout a wide range of contexts. Although trendy VPR strategies carry out nicely when utilized to contexts which might be akin to these through which they have been taught, reminiscent of city driving situations, these methods show a big decline in effectiveness in numerous settings, reminiscent of aquatic or aerial environments. Efforts have been put into designing a common VPR answer that may function with out error in any setting, together with aerial, underwater, and subterranean environments, at any time, being resilient to adjustments like day-night or seasonal differences, and from any viewpoint remaining unaffected by variations in perspective, together with diametrically reverse views.
To handle the restrictions, a bunch of researchers has launched a brand new baseline VPR methodology referred to as AnyLoc. The crew has examined the visible characteristic representations taken from large-scale pretrained fashions, which they check with as basis fashions, as an alternative choice to merely counting on VPR-specific coaching. Though these fashions usually are not initially educated for VPR, they do retailer a wealth of visible options which will someday type the cornerstone of an all-encompassing VPR answer.
Within the AnyLoc method, the most effective basis fashions and visible options with the required invariance attributes are rigorously chosen through which the invariance attributes embody the capability of the mannequin to keep up particular visible qualities regardless of adjustments within the environment or viewpoint. The prevalent local-aggregation strategies which might be regularly utilized in VPR literature are then merged with these chosen attributes. Making extra educated conclusions about location recognition requires the consolidation of information from totally different areas of the visible enter utilizing native aggregation methods.
AnyLoc works by fusing the muse fashions’ wealthy visible components with native aggregation methods, making the AnyLoc-equipped robotic extraordinarily adaptable and helpful in numerous settings. It might probably conduct visible location recognition in a variety of environments, at numerous occasions of the day or 12 months, and from different views. The crew has summarized the findings as follows.
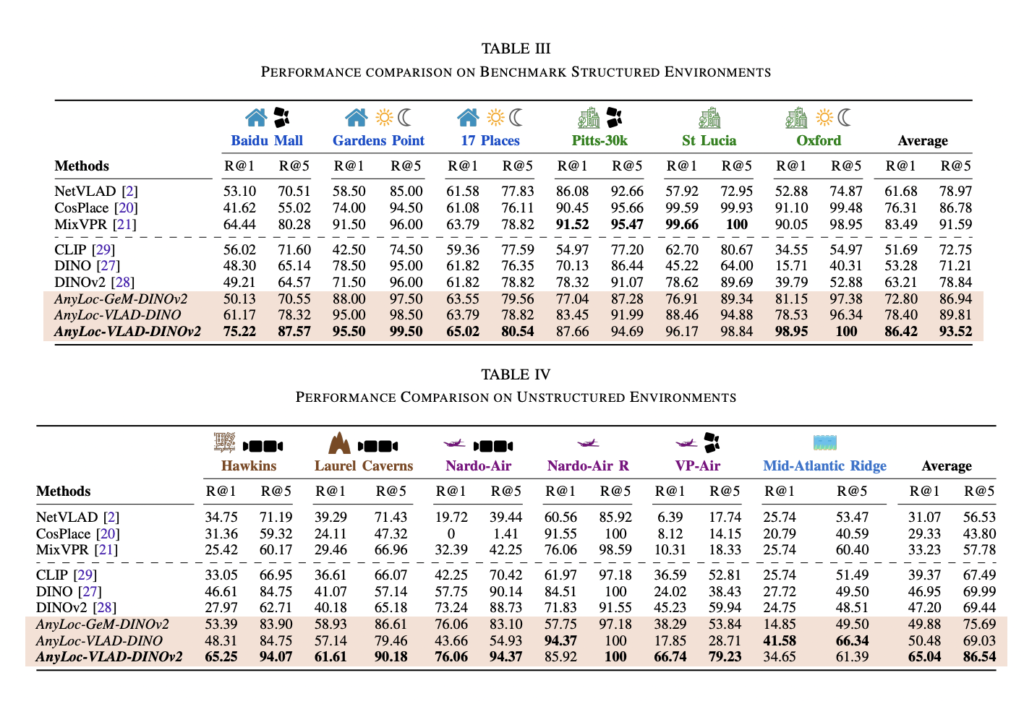
- Common VPR Answer: AnyLoc has been proposed as a brand new baseline for VPR, which works seamlessly throughout 12 numerous datasets encompassing place, time, and perspective variations.
- Characteristic-Methodology Synergy: Combining self-supervised options like DINOv2 with unsupervised aggregation like VLAD or GeM yields vital efficiency features over the direct use of per-image options from off-the-shelf fashions.
- Semantic Characteristic Characterization: Analyzing semantic properties of aggregated native options uncovers distinct domains within the latent house, enhancing VLAD vocabulary development and boosting efficiency.
- Sturdy Analysis: The crew has evaluated AnyLoc on numerous datasets in difficult VPR situations, reminiscent of day-night variations and opposing viewpoints, setting a robust baseline for future common VPR analysis.
Try the Paper, GitHub, and Project. All Credit score For This Analysis Goes To the Researchers on This Venture. Additionally, don’t overlook to affix our 27k+ ML SubReddit, 40k+ Facebook Community, Discord Channel, and Email Newsletter, the place we share the most recent AI analysis information, cool AI tasks, and extra.
Tanya Malhotra is a last 12 months undergrad from the College of Petroleum & Power Research, Dehradun, pursuing BTech in Laptop Science Engineering with a specialization in Synthetic Intelligence and Machine Studying.
She is a Knowledge Science fanatic with good analytical and significant pondering, together with an ardent curiosity in buying new expertise, main teams, and managing work in an organized method.