Getting began with TensorFlow Chance from R
With the abundance of nice libraries, in R, for statistical computing, why would you be involved in TensorFlow Chance (TFP, for brief)? Effectively – let’s take a look at an inventory of its elements:
- Distributions and bijectors (bijectors are reversible, composable maps)
- Probabilistic modeling (Edward2 and probabilistic community layers)
- Probabilistic inference (by way of MCMC or variational inference)
Now think about all these working seamlessly with the TensorFlow framework – core, Keras, contributed modules – and in addition, working distributed and on GPU. The sector of attainable functions is huge – and much too various to cowl as a complete in an introductory weblog publish.
As an alternative, our goal right here is to offer a primary introduction to TFP, specializing in direct applicability to and interoperability with deep studying.
We’ll shortly present the right way to get began with one of many primary constructing blocks: distributions. Then, we’ll construct a variational autoencoder just like that in Representation learning with MMD-VAE. This time although, we’ll make use of TFP to pattern from the prior and approximate posterior distributions.
We’ll regard this publish as a “proof on idea” for utilizing TFP with Keras – from R – and plan to observe up with extra elaborate examples from the world of semi-supervised illustration studying.
To put in TFP along with TensorFlow, merely append tensorflow-probability to the default listing of additional packages:
library(tensorflow)
install_tensorflow(
extra_packages = c("keras", "tensorflow-hub", "tensorflow-probability"),
model = "1.12"
)Now to make use of TFP, all we have to do is import it and create some helpful handles.
And right here we go, sampling from a normal regular distribution.
n <- tfd$Regular(loc = 0, scale = 1)
n$pattern(6L)tf.Tensor(
"Normal_1/pattern/Reshape:0", form=(6,), dtype=float32
)Now that’s good, however it’s 2019, we don’t wish to need to create a session to guage these tensors anymore. Within the variational autoencoder instance under, we’re going to see how TFP and TF keen execution are the right match, so why not begin utilizing it now.
To make use of keen execution, we’ve got to execute the next strains in a contemporary (R) session:
… and import TFP, similar as above.
tfp <- import("tensorflow_probability")
tfd <- tfp$distributionsNow let’s shortly take a look at TFP distributions.
Utilizing distributions
Right here’s that commonplace regular once more.
n <- tfd$Regular(loc = 0, scale = 1)Issues generally carried out with a distribution embody sampling:
# simply as in low-level tensorflow, we have to append L to point integer arguments
n$pattern(6L) tf.Tensor(
[-0.34403768 -0.14122334 -1.3832929 1.618252 1.364448 -1.1299014 ],
form=(6,),
dtype=float32
)In addition to getting the log chance. Right here we do this concurrently for 3 values.
tf.Tensor(
[-1.4189385 -0.9189385 -1.4189385], form=(3,), dtype=float32
)We are able to do the identical issues with plenty of different distributions, e.g., the Bernoulli:
b <- tfd$Bernoulli(0.9)
b$pattern(10L)tf.Tensor(
[1 1 1 0 1 1 0 1 0 1], form=(10,), dtype=int32
)tf.Tensor(
[-1.2411538 -0.3411539 -1.2411538 -1.2411538], form=(4,), dtype=float32
)Be aware that within the final chunk, we’re asking for the log possibilities of 4 impartial attracts.
Batch shapes and occasion shapes
In TFP, we are able to do the next.
tfp.distributions.Regular(
"Regular/", batch_shape=(3,), event_shape=(), dtype=float32
)Opposite to what it’d seem like, this isn’t a multivariate regular. As indicated by batch_shape=(3,), this can be a “batch” of impartial univariate distributions. The truth that these are univariate is seen in event_shape=(): Every of them lives in one-dimensional occasion area.
If as an alternative we create a single, two-dimensional multivariate regular:
tfp.distributions.MultivariateNormalDiag(
"MultivariateNormalDiag/", batch_shape=(), event_shape=(2,), dtype=float32
)we see batch_shape=(), event_shape=(2,), as anticipated.
After all, we are able to mix each, creating batches of multivariate distributions:
This instance defines a batch of three two-dimensional multivariate regular distributions.
Changing between batch shapes and occasion shapes
Unusual as it might sound, conditions come up the place we wish to remodel distribution shapes between these varieties – in truth, we’ll see such a case very quickly.
tfd$Impartial is used to transform dimensions in batch_shape to dimensions in event_shape.
Here’s a batch of three impartial Bernoulli distributions.
bs <- tfd$Bernoulli(probs=c(.3,.5,.7))
bstfp.distributions.Bernoulli(
"Bernoulli/", batch_shape=(3,), event_shape=(), dtype=int32
)We are able to convert this to a digital “three-dimensional” Bernoulli like this:
b <- tfd$Impartial(bs, reinterpreted_batch_ndims = 1L)
btfp.distributions.Impartial(
"IndependentBernoulli/", batch_shape=(), event_shape=(3,), dtype=int32
)Right here reinterpreted_batch_ndims tells TFP how lots of the batch dimensions are getting used for the occasion area, beginning to depend from the suitable of the form listing.
With this primary understanding of TFP distributions, we’re able to see them utilized in a VAE.
We’ll take the (not so) deep convolutional structure from Representation learning with MMD-VAE and use distributions for sampling and computing possibilities. Optionally, our new VAE will have the ability to be taught the prior distribution.
Concretely, the next exposition will include three components.
First, we current widespread code relevant to each a VAE with a static prior, and one which learns the parameters of the prior distribution.
Then, we’ve got the coaching loop for the primary (static-prior) VAE. Lastly, we focus on the coaching loop and extra mannequin concerned within the second (prior-learning) VAE.
Presenting each variations one after the opposite results in code duplications, however avoids scattering complicated if-else branches all through the code.
The second VAE is obtainable as part of the Keras examples so that you don’t have to repeat out code snippets. The code additionally accommodates extra performance not mentioned and replicated right here, comparable to for saving mannequin weights.
So, let’s begin with the widespread half.
On the threat of repeating ourselves, right here once more are the preparatory steps (together with just a few extra library masses).
Dataset
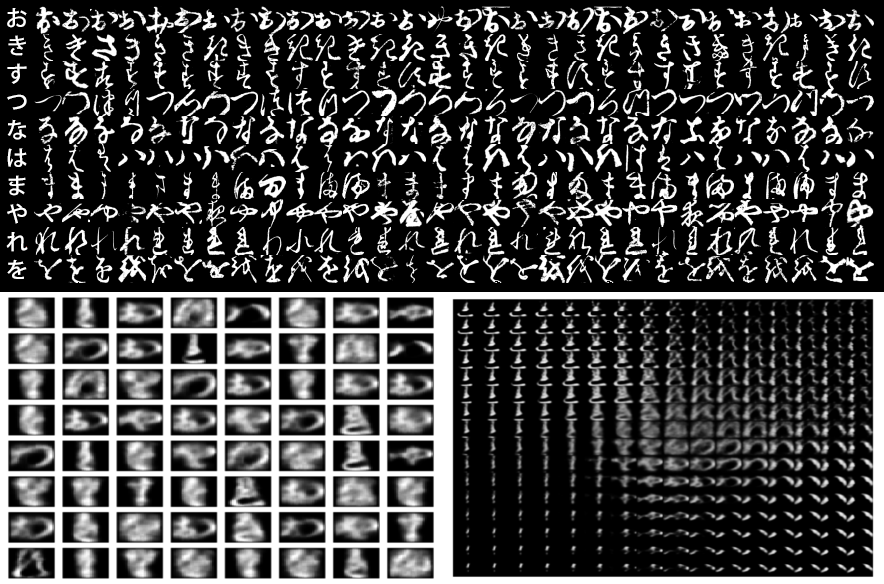
For a change from MNIST and Vogue-MNIST, we’ll use the model new Kuzushiji-MNIST(Clanuwat et al. 2018).

As in that different publish, we stream the information by way of tfdatasets:
buffer_size <- 60000
batch_size <- 256
batches_per_epoch <- buffer_size / batch_size
train_dataset <- tensor_slices_dataset(train_images) %>%
dataset_shuffle(buffer_size) %>%
dataset_batch(batch_size)Now let’s see what adjustments within the encoder and decoder fashions.
Encoder
The encoder differs from what we had with out TFP in that it doesn’t return the approximate posterior means and variances instantly as tensors. As an alternative, it returns a batch of multivariate regular distributions:
# you may wish to change this relying on the dataset
latent_dim <- 2
encoder_model <- perform(title = NULL) {
keras_model_custom(title = title, perform(self) {
self$conv1 <-
layer_conv_2d(
filters = 32,
kernel_size = 3,
strides = 2,
activation = "relu"
)
self$conv2 <-
layer_conv_2d(
filters = 64,
kernel_size = 3,
strides = 2,
activation = "relu"
)
self$flatten <- layer_flatten()
self$dense <- layer_dense(models = 2 * latent_dim)
perform (x, masks = NULL) {
x <- x %>%
self$conv1() %>%
self$conv2() %>%
self$flatten() %>%
self$dense()
tfd$MultivariateNormalDiag(
loc = x[, 1:latent_dim],
scale_diag = tf$nn$softplus(x[, (latent_dim + 1):(2 * latent_dim)] + 1e-5)
)
}
})
}Let’s do that out.
encoder <- encoder_model()
iter <- make_iterator_one_shot(train_dataset)
x <- iterator_get_next(iter)
approx_posterior <- encoder(x)
approx_posteriortfp.distributions.MultivariateNormalDiag(
"MultivariateNormalDiag/", batch_shape=(256,), event_shape=(2,), dtype=float32
)approx_posterior$pattern()tf.Tensor(
[[ 5.77791929e-01 -1.64988488e-02]
[ 7.93901443e-01 -1.00042784e+00]
[-1.56279251e-01 -4.06365871e-01]
...
...
[-6.47531569e-01 2.10889503e-02]], form=(256, 2), dtype=float32)
We don’t find out about you, however we nonetheless benefit from the ease of inspecting values with keen execution – loads.
Now, on to the decoder, which too returns a distribution as an alternative of a tensor.
Decoder
Within the decoder, we see why transformations between batch form and occasion form are helpful.
The output of self$deconv3 is four-dimensional. What we’d like is an on-off-probability for each pixel.
Previously, this was completed by feeding the tensor right into a dense layer and making use of a sigmoid activation.
Right here, we use tfd$Impartial to successfully tranform the tensor right into a chance distribution over three-dimensional photographs (width, peak, channel(s)).
decoder_model <- perform(title = NULL) {
keras_model_custom(title = title, perform(self) {
self$dense <- layer_dense(models = 7 * 7 * 32, activation = "relu")
self$reshape <- layer_reshape(target_shape = c(7, 7, 32))
self$deconv1 <-
layer_conv_2d_transpose(
filters = 64,
kernel_size = 3,
strides = 2,
padding = "similar",
activation = "relu"
)
self$deconv2 <-
layer_conv_2d_transpose(
filters = 32,
kernel_size = 3,
strides = 2,
padding = "similar",
activation = "relu"
)
self$deconv3 <-
layer_conv_2d_transpose(
filters = 1,
kernel_size = 3,
strides = 1,
padding = "similar"
)
perform (x, masks = NULL) {
x <- x %>%
self$dense() %>%
self$reshape() %>%
self$deconv1() %>%
self$deconv2() %>%
self$deconv3()
tfd$Impartial(tfd$Bernoulli(logits = x),
reinterpreted_batch_ndims = 3L)
}
})
}Let’s do that out too.
decoder <- decoder_model()
decoder_likelihood <- decoder(approx_posterior_sample)tfp.distributions.Impartial(
"IndependentBernoulli/", batch_shape=(256,), event_shape=(28, 28, 1), dtype=int32
)This distribution can be used to generate the “reconstructions,” in addition to decide the loglikelihood of the unique samples.
KL loss and optimizer
Each VAEs mentioned under will want an optimizer …
optimizer <- tf$prepare$AdamOptimizer(1e-4)… and each will delegate to compute_kl_loss to compute the KL a part of the loss.
This helper perform merely subtracts the log chance of the samples beneath the prior from their loglikelihood beneath the approximate posterior.
compute_kl_loss <- perform(
latent_prior,
approx_posterior,
approx_posterior_sample) {
kl_div <- approx_posterior$log_prob(approx_posterior_sample) -
latent_prior$log_prob(approx_posterior_sample)
avg_kl_div <- tf$reduce_mean(kl_div)
avg_kl_div
}Now that we’ve seemed on the widespread components, we first focus on the right way to prepare a VAE with a static prior.
On this VAE, we use TFP to create the standard isotropic Gaussian prior.
We then instantly pattern from this distribution within the coaching loop.
latent_prior <- tfd$MultivariateNormalDiag(
loc = tf$zeros(list(latent_dim)),
scale_identity_multiplier = 1
)And right here is the whole coaching loop. We’ll level out the essential TFP-related steps under.
for (epoch in seq_len(num_epochs)) {
iter <- make_iterator_one_shot(train_dataset)
total_loss <- 0
total_loss_nll <- 0
total_loss_kl <- 0
until_out_of_range({
x <- iterator_get_next(iter)
with(tf$GradientTape(persistent = TRUE) %as% tape, {
approx_posterior <- encoder(x)
approx_posterior_sample <- approx_posterior$pattern()
decoder_likelihood <- decoder(approx_posterior_sample)
nll <- -decoder_likelihood$log_prob(x)
avg_nll <- tf$reduce_mean(nll)
kl_loss <- compute_kl_loss(
latent_prior,
approx_posterior,
approx_posterior_sample
)
loss <- kl_loss + avg_nll
})
total_loss <- total_loss + loss
total_loss_nll <- total_loss_nll + avg_nll
total_loss_kl <- total_loss_kl + kl_loss
encoder_gradients <- tape$gradient(loss, encoder$variables)
decoder_gradients <- tape$gradient(loss, decoder$variables)
optimizer$apply_gradients(purrr::transpose(list(
encoder_gradients, encoder$variables
)),
global_step = tf$prepare$get_or_create_global_step())
optimizer$apply_gradients(purrr::transpose(list(
decoder_gradients, decoder$variables
)),
global_step = tf$prepare$get_or_create_global_step())
})
cat(
glue(
"Losses (epoch): {epoch}:",
" {(as.numeric(total_loss_nll)/batches_per_epoch) %>% spherical(4)} nll",
" {(as.numeric(total_loss_kl)/batches_per_epoch) %>% spherical(4)} kl",
" {(as.numeric(total_loss)/batches_per_epoch) %>% spherical(4)} whole"
),
"n"
)
}Above, enjoying round with the encoder and the decoder, we’ve already seen how
approx_posterior <- encoder(x)offers us a distribution we are able to pattern from. We use it to acquire samples from the approximate posterior:
approx_posterior_sample <- approx_posterior$pattern()These samples, we take them and feed them to the decoder, who offers us on-off-likelihoods for picture pixels.
decoder_likelihood <- decoder(approx_posterior_sample)Now the loss consists of the standard ELBO elements: reconstruction loss and KL divergence.
The reconstruction loss we instantly get hold of from TFP, utilizing the realized decoder distribution to evaluate the chance of the unique enter.
nll <- -decoder_likelihood$log_prob(x)
avg_nll <- tf$reduce_mean(nll)The KL loss we get from compute_kl_loss, the helper perform we noticed above:
kl_loss <- compute_kl_loss(
latent_prior,
approx_posterior,
approx_posterior_sample
)We add each and arrive on the total VAE loss:
loss <- kl_loss + avg_nllOther than these adjustments resulting from utilizing TFP, the coaching course of is simply regular backprop, the way in which it seems to be utilizing keen execution.
Now let’s see how as an alternative of utilizing the usual isotropic Gaussian, we might be taught a mix of Gaussians.
The selection of variety of distributions right here is fairly arbitrary. Simply as with latent_dim, you may wish to experiment and discover out what works greatest in your dataset.
mixture_components <- 16
learnable_prior_model <- perform(title = NULL, latent_dim, mixture_components) {
keras_model_custom(title = title, perform(self) {
self$loc <-
tf$get_variable(
title = "loc",
form = list(mixture_components, latent_dim),
dtype = tf$float32
)
self$raw_scale_diag <- tf$get_variable(
title = "raw_scale_diag",
form = c(mixture_components, latent_dim),
dtype = tf$float32
)
self$mixture_logits <-
tf$get_variable(
title = "mixture_logits",
form = c(mixture_components),
dtype = tf$float32
)
perform (x, masks = NULL) {
tfd$MixtureSameFamily(
components_distribution = tfd$MultivariateNormalDiag(
loc = self$loc,
scale_diag = tf$nn$softplus(self$raw_scale_diag)
),
mixture_distribution = tfd$Categorical(logits = self$mixture_logits)
)
}
})
}In TFP terminology, components_distribution is the underlying distribution kind, and mixture_distribution holds the possibilities that particular person elements are chosen.
Be aware how self$loc, self$raw_scale_diag and self$mixture_logits are TensorFlow Variables and thus, persistent and updatable by backprop.
Now we create the mannequin.
latent_prior_model <- learnable_prior_model(
latent_dim = latent_dim,
mixture_components = mixture_components
)How will we get hold of a latent prior distribution we are able to pattern from? A bit unusually, this mannequin can be referred to as with out an enter:
latent_prior <- latent_prior_model(NULL)
latent_priortfp.distributions.MixtureSameFamily(
"MixtureSameFamily/", batch_shape=(), event_shape=(2,), dtype=float32
)Right here now’s the whole coaching loop. Be aware how we’ve got a 3rd mannequin to backprop via.
for (epoch in seq_len(num_epochs)) {
iter <- make_iterator_one_shot(train_dataset)
total_loss <- 0
total_loss_nll <- 0
total_loss_kl <- 0
until_out_of_range({
x <- iterator_get_next(iter)
with(tf$GradientTape(persistent = TRUE) %as% tape, {
approx_posterior <- encoder(x)
approx_posterior_sample <- approx_posterior$pattern()
decoder_likelihood <- decoder(approx_posterior_sample)
nll <- -decoder_likelihood$log_prob(x)
avg_nll <- tf$reduce_mean(nll)
latent_prior <- latent_prior_model(NULL)
kl_loss <- compute_kl_loss(
latent_prior,
approx_posterior,
approx_posterior_sample
)
loss <- kl_loss + avg_nll
})
total_loss <- total_loss + loss
total_loss_nll <- total_loss_nll + avg_nll
total_loss_kl <- total_loss_kl + kl_loss
encoder_gradients <- tape$gradient(loss, encoder$variables)
decoder_gradients <- tape$gradient(loss, decoder$variables)
prior_gradients <-
tape$gradient(loss, latent_prior_model$variables)
optimizer$apply_gradients(purrr::transpose(list(
encoder_gradients, encoder$variables
)),
global_step = tf$prepare$get_or_create_global_step())
optimizer$apply_gradients(purrr::transpose(list(
decoder_gradients, decoder$variables
)),
global_step = tf$prepare$get_or_create_global_step())
optimizer$apply_gradients(purrr::transpose(list(
prior_gradients, latent_prior_model$variables
)),
global_step = tf$prepare$get_or_create_global_step())
})
checkpoint$save(file_prefix = checkpoint_prefix)
cat(
glue(
"Losses (epoch): {epoch}:",
" {(as.numeric(total_loss_nll)/batches_per_epoch) %>% spherical(4)} nll",
" {(as.numeric(total_loss_kl)/batches_per_epoch) %>% spherical(4)} kl",
" {(as.numeric(total_loss)/batches_per_epoch) %>% spherical(4)} whole"
),
"n"
)
} And that’s it! For us, each VAEs yielded related outcomes, and we didn’t expertise nice variations from experimenting with latent dimensionality and the variety of combination distributions. However once more, we wouldn’t wish to generalize to different datasets, architectures, and so on.
Talking of outcomes, how do they give the impression of being? Right here we see letters generated after 40 epochs of coaching. On the left are random letters, on the suitable, the standard VAE grid show of latent area.

Hopefully, we’ve succeeded in exhibiting that TensorFlow Chance, keen execution, and Keras make for a beautiful mixture! Should you relate total amount of code required to the complexity of the duty, in addition to depth of the ideas concerned, this could seem as a fairly concise implementation.
Within the nearer future, we plan to observe up with extra concerned functions of TensorFlow Chance, principally from the world of illustration studying. Keep tuned!