Visible language maps for robotic navigation – Google AI Weblog

Individuals are wonderful navigators of the bodily world, due partly to their exceptional potential to construct cognitive maps that kind the idea of spatial memory — from localizing landmarks at various ontological ranges (like a guide on a shelf in the lounge) to figuring out whether or not a format permits navigation from level A to level B. Constructing robots which are proficient at navigation requires an interconnected understanding of (a) imaginative and prescient and pure language (to affiliate landmarks or observe directions), and (b) spatial reasoning (to attach a map representing an surroundings to the true spatial distribution of objects). Whereas there have been many recent advances in coaching joint visual-language fashions on Web-scale information, determining learn how to finest join them to a spatial illustration of the bodily world that can be utilized by robots stays an open analysis query.
To discover this, we collaborated with researchers on the University of Freiburg and Nuremberg to develop Visual Language Maps (VLMaps), a map illustration that straight fuses pre-trained visual-language embeddings right into a 3D reconstruction of the surroundings. VLMaps, which is about to look at ICRA 2023, is an easy strategy that enables robots to (1) index visible landmarks within the map utilizing pure language descriptions, (2) make use of Code as Policies to navigate to spatial objectives, akin to “go in between the couch and TV” or “transfer three meters to the fitting of the chair”, and (3) generate open-vocabulary impediment maps — permitting a number of robots with totally different morphologies (cell manipulators vs. drones, for instance) to make use of the identical VLMap for path planning. VLMaps can be utilized out-of-the-box with out further labeled information or mannequin fine-tuning, and outperforms different zero-shot strategies by over 17% on difficult object-goal and spatial-goal navigation duties in Habitat and Matterport3D. We’re additionally releasing the code used for our experiments together with an interactive simulated robot demo.
| VLMaps will be constructed by fusing pre-trained visual-language embeddings right into a 3D reconstruction of the surroundings. At runtime, a robotic can question the VLMap to find visible landmarks given pure language descriptions, or to construct open-vocabulary impediment maps for path planning. |
Basic 3D maps with a contemporary multimodal twist
VLMaps combines the geometric construction of traditional 3D reconstructions with the expression of contemporary visual-language fashions pre-trained on Web-scale information. Because the robotic strikes round, VLMaps makes use of a pre-trained visual-language mannequin to compute dense per-pixel embeddings from posed RGB digital camera views, and integrates them into a big map-sized 3D tensor aligned with an present 3D reconstruction of the bodily world. This illustration permits the system to localize landmarks given their pure language descriptions (akin to “a guide on a shelf in the lounge”) by evaluating their textual content embeddings to all areas within the tensor and discovering the closest match. Querying these goal areas can be utilized straight as purpose coordinates for language-conditioned navigation, as primitive API operate requires Code as Insurance policies to course of spatial objectives (e.g., code-writing fashions interpret “in between” as arithmetic between two areas), or to sequence a number of navigation objectives for long-horizon directions.
# transfer first to the left aspect of the counter, then transfer between the sink and the oven, then transfer backwards and forwards to the couch and the desk twice. robotic.move_to_left('counter') robotic.move_in_between('sink', 'oven') pos1 = robotic.get_pos('couch') pos2 = robotic.get_pos('desk') for i in vary(2): robotic.move_to(pos1) robotic.move_to(pos2) # transfer 2 meters north of the laptop computer, then transfer 3 meters rightward. robotic.move_north('laptop computer') robotic.face('laptop computer') robotic.flip(180) robotic.move_forward(2) robotic.flip(90) robotic.move_forward(3)
| VLMaps can be utilized to return the map coordinates of landmarks given pure language descriptions, which will be wrapped as a primitive API operate name for Code as Insurance policies to sequence a number of objectives long-horizon navigation directions. |
Outcomes
We consider VLMaps on difficult zero-shot object-goal and spatial-goal navigation duties in Habitat and Matterport3D, with out further coaching or fine-tuning. The robotic is requested to navigate to 4 subgoals sequentially laid out in pure language. We observe that VLMaps considerably outperforms sturdy baselines (together with CoW and LM-Nav) by as much as 17% attributable to its improved visuo-lingual grounding.
| Duties | Variety of subgoals in a row | Impartial subgoals |
||||||||
| 1 | 2 | 3 | 4 | |||||||
| LM-Nav | 26 | 4 | 1 | 1 | 26 | |||||
| CoW | 42 | 15 | 7 | 3 | 36 | |||||
| CLIP MAP | 33 | 8 | 2 | 0 | 30 | |||||
| VLMaps (ours) | 59 | 34 | 22 | 15 | 59 | |||||
| GT Map | 91 | 78 | 71 | 67 | 85 | |||||
| The VLMaps-approach performs favorably over various open-vocabulary baselines on multi-object navigation (success price [%]) and particularly excels on longer-horizon duties with a number of sub-goals. |
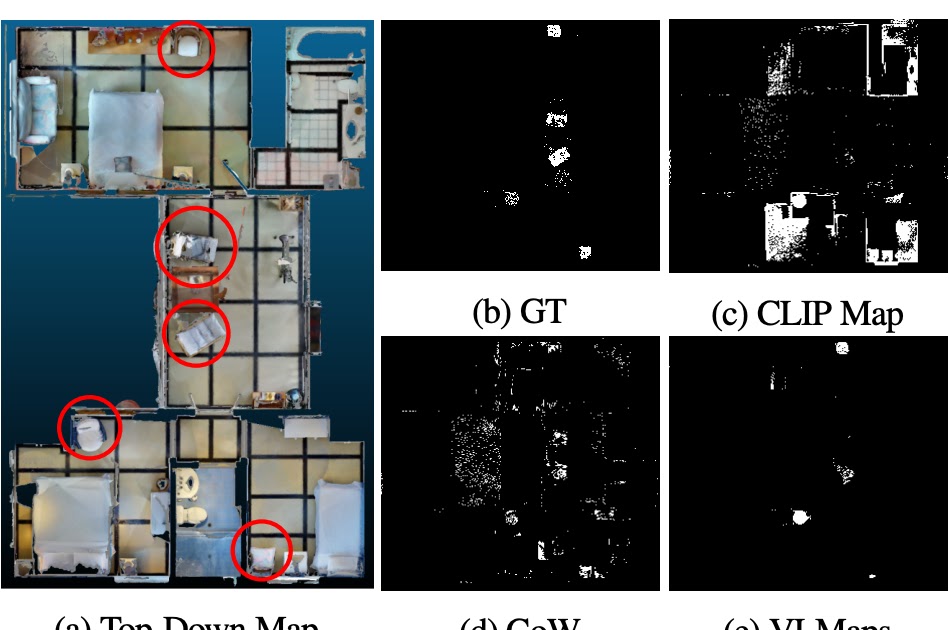
A key benefit of VLMaps is its potential to know spatial objectives, akin to “go in between the couch and TV” or “transfer three meters to the fitting of the chair”. Experiments for long-horizon spatial-goal navigation present an enchancment by as much as 29%. To achieve extra insights into the areas within the map which are activated for various language queries, we visualize the heatmaps for the article sort “chair”.
 |
| The improved imaginative and prescient and language grounding capabilities of VLMaps, which comprises considerably fewer false positives than competing approaches, allow it to navigate zero-shot to landmarks utilizing language descriptions. |
Open-vocabulary impediment maps
A single VLMap of the identical surroundings can be used to construct open-vocabulary impediment maps for path planning. That is achieved by taking the union of binary-thresholded detection maps over an inventory of landmark classes that the robotic can or can not traverse (akin to “tables”, “chairs”, “partitions”, and many others.). That is helpful since robots with totally different morphologies might transfer round in the identical surroundings in a different way. For instance, “tables” are obstacles for a big cell robotic, however could also be traversable for a drone. We observe that utilizing VLMaps to create a number of robot-specific impediment maps improves navigation effectivity by as much as 4% (measured when it comes to job success charges weighted by path size) over utilizing a single shared impediment map for every robotic. See the paper for extra particulars.
 |
| Experiments with a cell robotic (LoCoBot) and drone in AI2THOR simulated environments. Left: High-down view of an surroundings. Center columns: Brokers’ observations throughout navigation. Proper: Impediment maps generated for various embodiments with corresponding navigation paths. |
Conclusion
VLMaps takes an preliminary step in the direction of grounding pre-trained visual-language data onto spatial map representations that can be utilized by robots for navigation. Experiments in simulated and actual environments present that VLMaps can allow language-using robots to (i) index landmarks (or spatial areas relative to them) given their pure language descriptions, and (ii) generate open-vocabulary impediment maps for path planning. Extending VLMaps to deal with extra dynamic environments (e.g., with transferring individuals) is an fascinating avenue for future work.
Open-source launch
Now we have launched the code wanted to breed our experiments and an interactive simulated robotic demo on the project website, which additionally comprises further movies and code to benchmark brokers in simulation.
Acknowledgments
We want to thank the co-authors of this analysis: Chenguang Huang and Wolfram Burgard.