No TD Studying, Benefit Reweighting, or Transformers – The Berkeley Synthetic Intelligence Analysis Weblog

An indication of the RvS coverage we study with simply supervised studying and a depth-two MLP. It makes use of no TD studying, benefit reweighting, or Transformers!
Offline reinforcement studying (RL) is conventionally approached utilizing value-based strategies based mostly on temporal distinction (TD) studying. Nevertheless, many current algorithms reframe RL as a supervised studying downside. These algorithms study conditional insurance policies by conditioning on purpose states (Lynch et al., 2019; Ghosh et al., 2021), reward-to-go (Kumar et al., 2019; Chen et al., 2021), or language descriptions of the duty (Lynch and Sermanet, 2021).
We discover the simplicity of those strategies fairly interesting. If supervised studying is sufficient to clear up RL issues, then offline RL may develop into broadly accessible and (comparatively) straightforward to implement. Whereas TD studying should delicately stability an actor coverage with an ensemble of critics, these supervised studying strategies prepare only one (conditional) coverage, and nothing else!
So, how can we use these strategies to successfully clear up offline RL issues? Prior work places ahead quite a few intelligent suggestions and tips, however these tips are typically contradictory, making it difficult for practitioners to determine methods to efficiently apply these strategies. For instance, RCPs (Kumar et al., 2019) require fastidiously reweighting the coaching information, GCSL (Ghosh et al., 2021) requires iterative, on-line information assortment, and Resolution Transformer (Chen et al., 2021) makes use of a Transformer sequence mannequin because the coverage community.
Which, if any, of those hypotheses are right? Do we have to reweight our coaching information based mostly on estimated benefits? Are Transformers essential to get a high-performing coverage? Are there different essential design choices which were unnoticed of prior work?
Our work goals to reply these questions by making an attempt to determine the important components of offline RL through supervised studying. We run experiments throughout 4 suites, 26 environments, and eight algorithms. When the mud settles, we get aggressive efficiency in each setting suite we think about using remarkably easy components. The video above exhibits the complicated conduct we study utilizing simply supervised studying with a depth-two MLP – no TD studying, information reweighting, or Transformers!
Let’s start with an summary of the algorithm we research. Whereas plenty of prior work (Kumar et al., 2019; Ghosh et al., 2021; and Chen et al., 2021) share the identical core algorithm, it lacks a standard title. To fill this hole, we suggest the time period RL through Supervised Studying (RvS). We’re not proposing any new algorithm however slightly displaying how prior work could be considered from a unifying framework; see Determine 1.
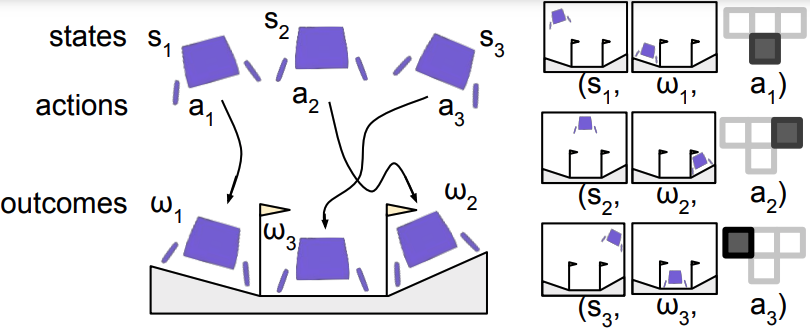
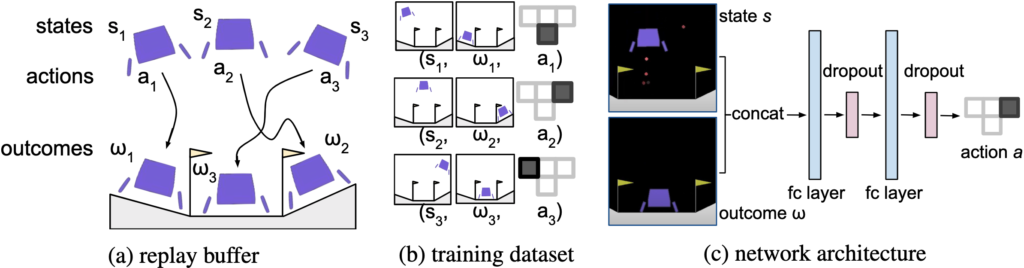
Determine 1. (Left) A replay buffer of expertise (Proper) Hindsight relabelled coaching information
RL through Supervised Studying takes as enter a replay buffer of expertise together with states, actions, and outcomes. The outcomes could be an arbitrary perform of the trajectory, together with a purpose state, reward-to-go, or language description. Then, RvS performs hindsight relabeling to generate a dataset of state, motion, and consequence triplets. The instinct is that the actions which can be noticed present supervision for the outcomes which can be reached. With this coaching dataset, RvS performs supervised studying by maximizing the probability of the actions given the states and outcomes. This yields a conditional coverage that may situation on arbitrary outcomes at take a look at time.
In our experiments, we deal with the next three key questions.
- Which design choices are essential for RL through supervised studying?
- How properly does RL through supervised studying really work? We are able to do RL through supervised studying, however would utilizing a special offline RL algorithm carry out higher?
- What kind of consequence variable ought to we situation on? (And does it even matter?)
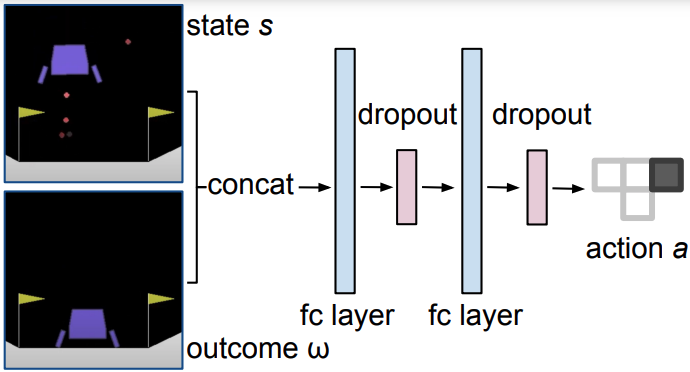
Determine 2. Our RvS structure. A depth-two MLP suffices in each setting suite we contemplate.
We get good efficiency utilizing only a depth-two multi-layer perceptron. The truth is, that is aggressive with all beforehand revealed architectures we’re conscious of, together with a Transformer sequence mannequin. We simply concatenate the state and consequence earlier than passing them via two fully-connected layers (see Determine 2). The keys that we determine are having a community with massive capability – we use width 1024 – in addition to dropout in some environments. We discover that this works properly with out reweighting the coaching information or performing any extra regularization.
After figuring out these key design choices, we research the general efficiency of RvS compared to earlier strategies. This weblog publish will overview outcomes from two of the suites we contemplate within the paper.
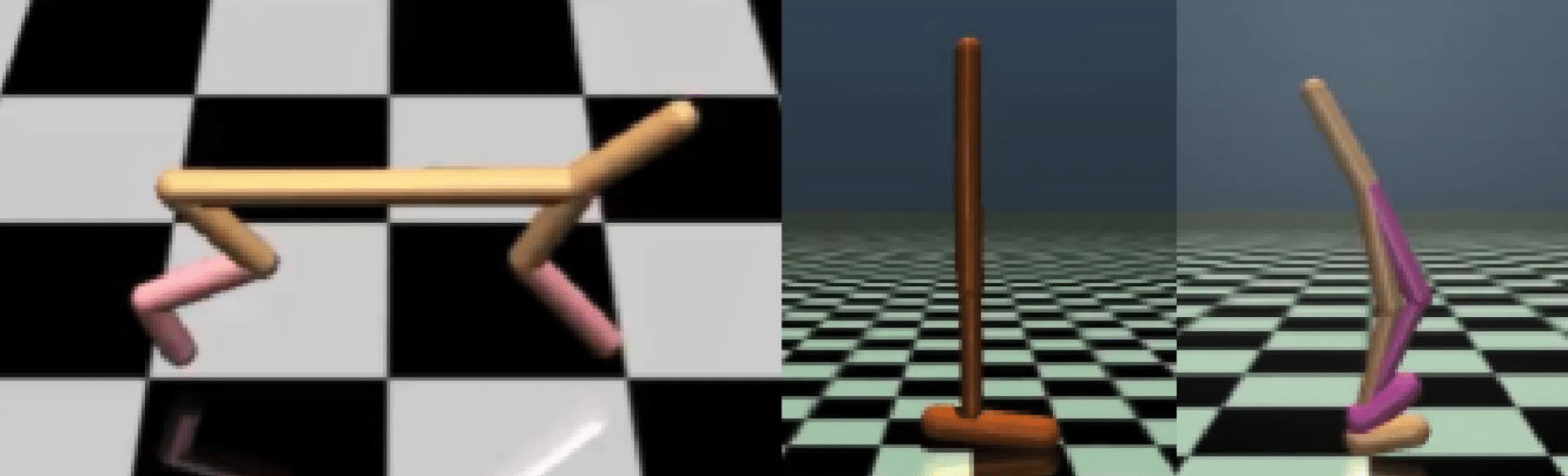
The primary suite is D4RL Health club, which comprises the usual MuJoCo halfcheetah, hopper, and walker robots. The problem in D4RL Health club is to study locomotion insurance policies from offline datasets of various high quality. For instance, one offline dataset comprises rollouts from a very random coverage. One other dataset comprises rollouts from a “medium” coverage educated partway to convergence, whereas one other dataset is a combination of rollouts from medium and skilled insurance policies.
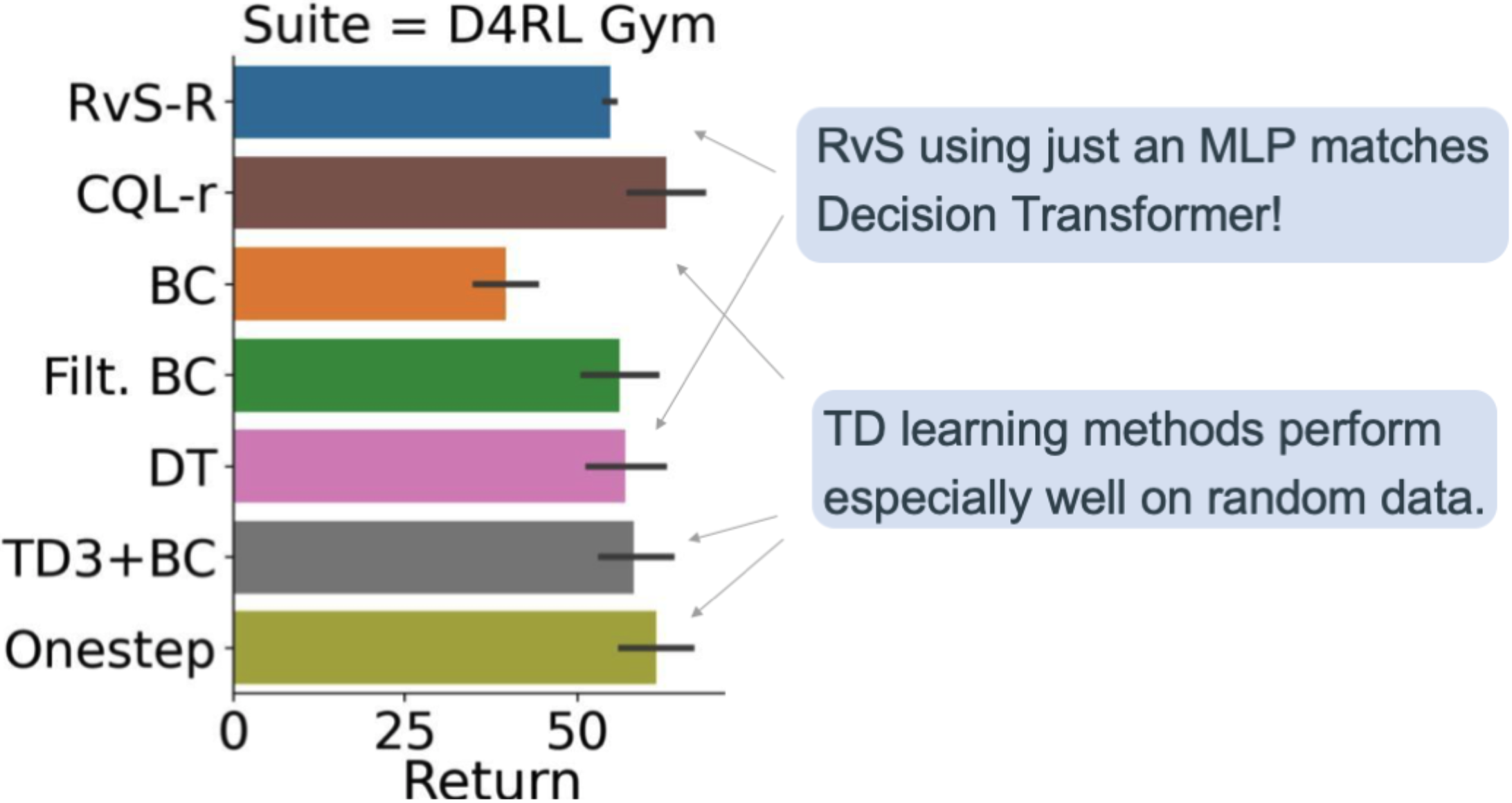
Determine 3. General efficiency in D4RL Health club.
Determine 3 exhibits our leads to D4RL Health club. RvS-R is our implementation of RvS conditioned on rewards (illustrated in Determine 2). On common throughout all 12 duties within the suite, we see that RvS-R, which makes use of only a depth-two MLP, is aggressive with Resolution Transformer (DT; Chen et al., 2021). We additionally see that RvS-R is aggressive with the strategies that use temporal distinction (TD) studying, together with CQL-R (Kumar et al., 2020), TD3+BC (Fujimoto et al., 2021), and Onestep (Brandfonbrener et al., 2021). Nevertheless, the TD studying strategies have an edge as a result of they carry out particularly properly on the random datasets. This implies that one may favor TD studying over RvS when coping with low-quality information.
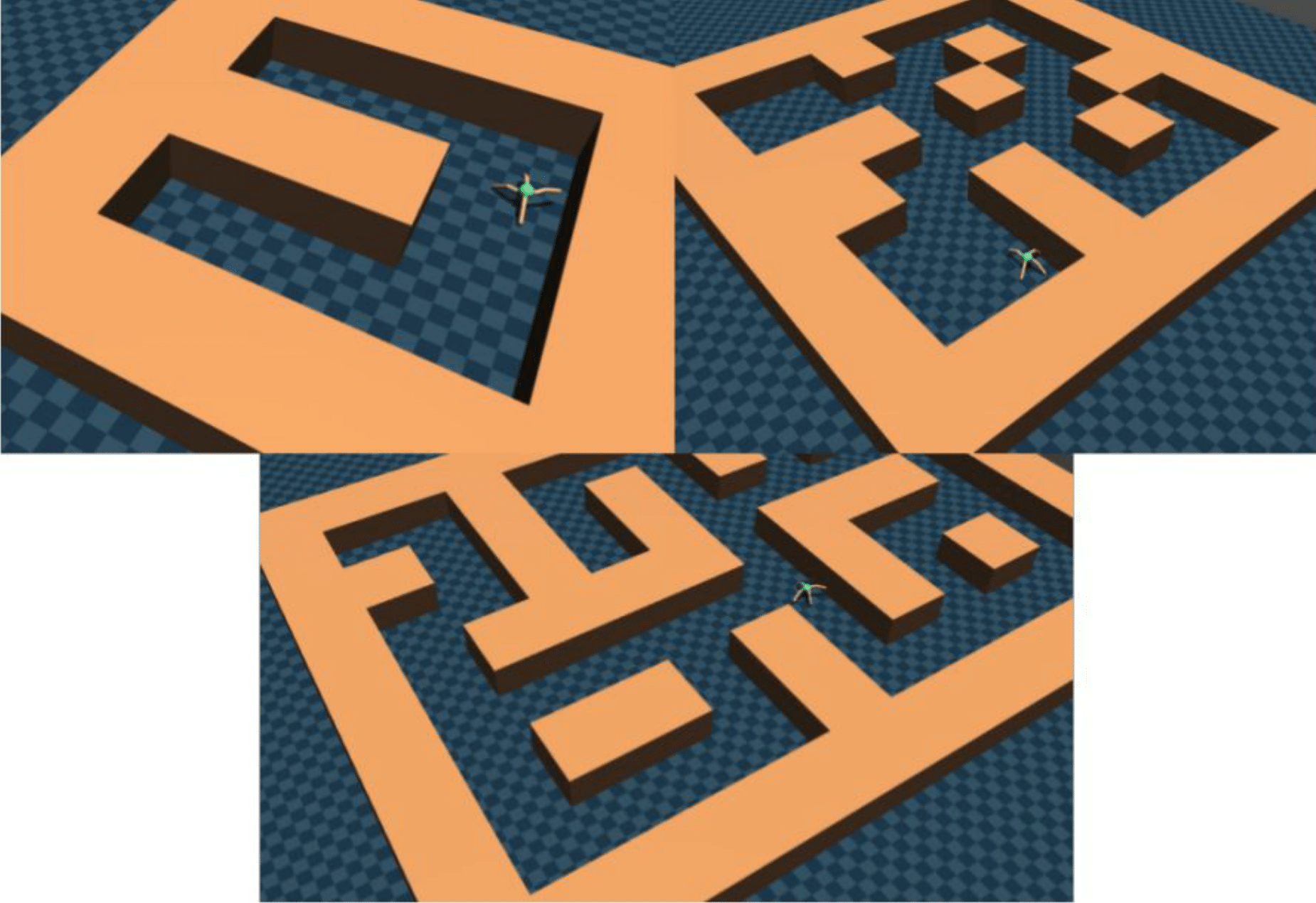
The second suite is D4RL AntMaze. This suite requires a quadruped to navigate to a goal location in mazes of various dimension. The problem of AntMaze is that many trajectories comprise solely items of the total path from the begin to the purpose location. Studying from these trajectories requires stitching collectively these items to get the total, profitable path.
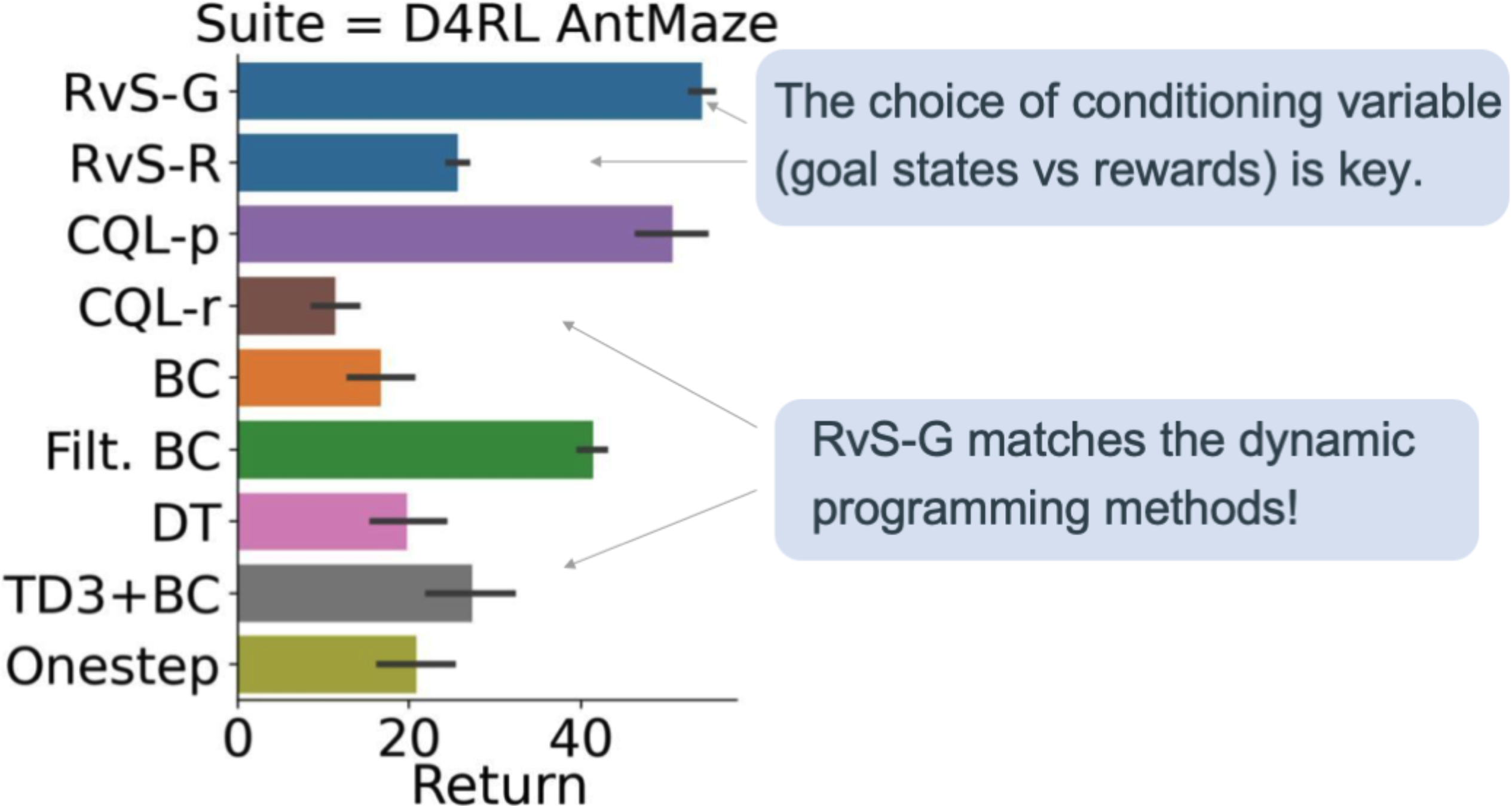
Determine 4. General efficiency in D4RL AntMaze.
Our AntMaze leads to Determine 4 spotlight the significance of the conditioning variable. Whereas conditioning RvS on rewards (RvS-R) was the only option of the conditioning variable in D4RL Health club, we discover that in D4RL AntMaze, it’s significantly better to situation RvS on $(x, y)$ purpose coordinates (RvS-G). Once we do that, we see that RvS-G compares favorably to TD studying! This was shocking to us as a result of TD studying explicitly performs dynamic programming utilizing the Bellman equation.
Why does goal-conditioning carry out higher than reward conditioning on this setting? Recall that AntMaze is designed so that straightforward imitation isn’t sufficient: optimum strategies should sew collectively elements of suboptimal trajectories to determine methods to attain the purpose. In precept, TD studying can clear up this with temporal compositionality. With the Bellman equation, TD studying can mix a path from A to B with a path from B to C, yielding a path from A to C. RvS-R, together with different conduct cloning strategies, doesn’t profit from this temporal compositionality. We hypothesize that RvS-G, however, advantages from spatial compositionality. It’s because, in AntMaze, the coverage wanted to succeed in one purpose is much like the coverage wanted to succeed in a close-by purpose. We see correspondingly that RvS-G beats RvS-R.
After all, conditioning RvS-G on $(x, y)$ coordinates represents a type of prior information concerning the job. However this additionally highlights an essential consideration for RvS strategies: the selection of conditioning info is critically essential, and it might rely considerably on the duty.
General, we discover that in a various set of environments, RvS works properly without having any fancy algorithmic tips (reminiscent of information reweighting) or fancy architectures (reminiscent of Transformers). Certainly, our easy RvS setup can match, and even outperform, strategies that make the most of (conservative) TD studying. The keys for RvS that we determine are mannequin capability, regularization, and the conditioning variable.
In our work, we handcraft the conditioning variable, reminiscent of $(x, y)$ coordinates in AntMaze. Past the usual offline RL setup, this introduces an extra assumption, specifically, that we’ve got some prior details about the construction of the duty. We predict an thrilling path for future work can be to take away this assumption by automating the educational of the purpose house.
We packaged our open-source code in order that it could possibly robotically deal with all of the dependencies for you. After downloading the code, you possibly can run these 5 instructions to breed our experiments:
docker construct -t rvs:newest .
docker run -it --rm -v $(pwd):/rvs rvs:newest bash
cd rvs
pip set up -e .
bash experiments/launch_gym_rvs_r.sh
This publish relies on the paper:
RvS: What is Essential for Offline RL via Supervised Learning?
Scott Emmons, Benjamin Eysenbach, Ilya Kostrikov, Sergey Levine
Worldwide Convention on Studying Representations (ICLR), 2022
[Paper] [Code]