Inventive Robotic Device Use with Giant Language Fashions – Machine Studying Weblog | ML@CMU
TLDR: We introduce RoboTool, enabling robots to make use of instruments creatively with giant language fashions, which solves long-horizon hybrid discrete-continuous planning issues with the environment- and embodiment-related constraints.
Device use is an important hallmark of superior intelligence. Some animals can use instruments to realize targets which can be infeasible with out instruments. For instance, crows clear up a fancy bodily puzzle utilizing a collection of instruments, and apes use a tree department to crack open nuts or fish termites with a stick. Past utilizing instruments for his or her meant objective and following established procedures, utilizing instruments in artistic and unconventional methods gives extra versatile options, albeit presents way more challenges in cognitive capacity.
In robotics, artistic instrument use can be a vital but very demanding functionality as a result of it necessitates the all-around capacity to foretell the end result of an motion, cause what instruments to make use of, and plan how one can use them. On this work, we wish to discover the query, can we allow such artistic tool-use functionality in robots? We determine that artistic robotic instrument use solves a fancy long-horizon planning process with constraints associated to atmosphere and robotic capability. For instance, ”grasp a milk carton” whereas the milk carton’s location is out of the robotic arm’s workspace or ”strolling to the opposite couch” whereas there exists a niche in the best way that exceeds the quadrupedal robotic’s strolling functionality.
Job and movement planning (TAMP) is a standard framework for fixing such long-horizon planning duties. It combines low-level steady movement planning in traditional robotics and high-level discrete process planning to unravel advanced planning duties which can be tough to deal with by any of those domains alone. Present literature reveals that it might deal with instrument use in a static atmosphere with optimization-based approaches equivalent to logic-geometric programming. Nevertheless, this optimization method usually requires a lengthy computation time for duties with many objects and process planning steps as a result of growing search area. As well as, classical TAMP strategies are restricted to the household of duties that may be expressed in formal logic and symbolic illustration, making them not user-friendly for non-experts.
Not too long ago, giant language fashions (LLMs) have been proven to encode huge data useful to robotics duties in reasoning, planning, and performing. TAMP strategies with LLMs can bypass the computation burden of the specific optimization course of in classical TAMP. Prior works present that LLMs can adeptly dissect duties given both clear or ambiguous language descriptions and directions. Nevertheless, it’s nonetheless unclear how one can use LLMs to clear up extra advanced duties that require reasoning with implicit constraints imposed by the robotic’s embodiment and its surrounding bodily world.
Strategies
On this work, we’re fascinated about fixing language-instructed long-horizon robotics duties with implicitly activated bodily constraints. By offering LLMs with ample numerical semantic info in pure language, we observe that LLMs can determine the activated constraints induced by the spatial structure of objects within the scene and the robotic’s embodiment limits, suggesting that LLMs might keep data and reasoning functionality concerning the 3D bodily world. Moreover, our complete checks reveal that LLMs should not solely adept at using instruments to rework in any other case unfeasible duties into possible ones but in addition show creativity in utilizing instruments past their standard features, based mostly on their materials, form, and geometric options.
To unravel the aforementioned drawback, we introduce RoboTool, a artistic robotic instrument person constructed on LLMs, which makes use of instruments past their commonplace affordances. RoboTool accepts pure language directions comprising textual and numerical details about the atmosphere, robotic embodiments, and constraints to comply with. RoboTool produces code that invokes the robotic’s parameterized low-level expertise to regulate each simulated and bodily robots. RoboTool consists of 4 central elements, with every dealing with one performance, as depicted under:
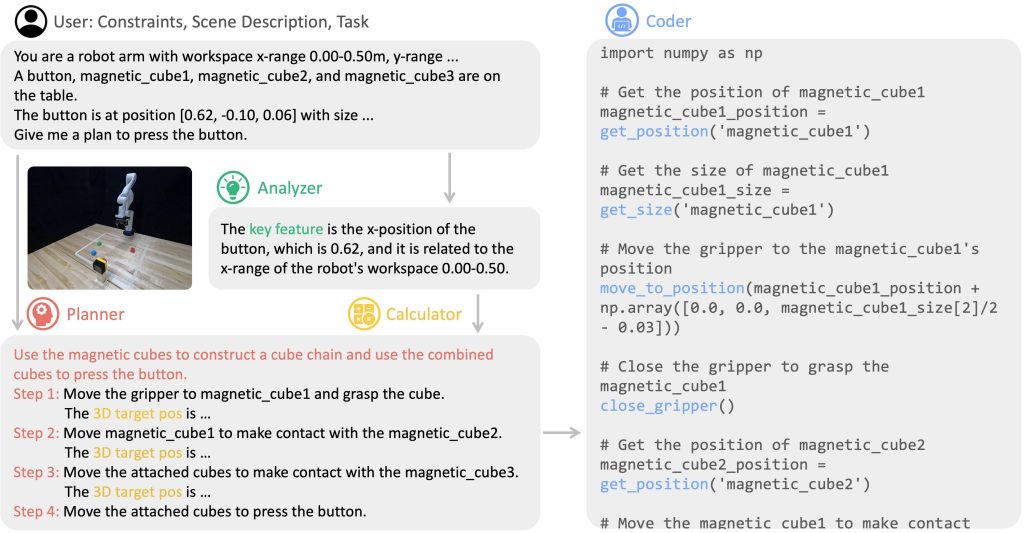
- Analyzer, which processes the pure language enter to determine key ideas that would impression the duty’s feasibility.
- Planner, which receives each the unique language enter and the recognized key ideas to formulate a complete technique for finishing the duty.
- Calculator, which is chargeable for figuring out the parameters, such because the goal positions required for every parameterized talent.
- Coder, which converts the great plan and parameters into executable code. All of those elements are constructed utilizing GPT-4.
Benchmark
On this work, we intention to discover three difficult classes of artistic instrument use for robots: instrument choice, sequential instrument use, and power manufacturing. We design six duties for 2 totally different robotic embodiments: a quadrupedal robotic and a robotic arm.
- Device choice (Couch-Traversing and Milk-Reaching) requires the reasoning functionality to decide on probably the most applicable instruments amongst a number of choices. It calls for a broad understanding of object attributes equivalent to measurement, materials, and form, in addition to the flexibility to investigate the connection between these properties and the meant goal.
- Sequential instrument use (Couch-Climbing and Can-Greedy) entails using a collection of instruments in a selected order to succeed in a desired aim. Its complexity arises from the necessity for long-horizon planning to find out one of the best sequence for instrument use, with profitable completion relying on the accuracy of every step within the plan.
- Device manufacturing (Dice-Lifting and Button-Urgent) includes undertaking duties by crafting instruments from accessible supplies or adapting present ones. This process requires the robotic to discern implicit connections amongst objects and assemble elements by way of manipulation.
Outcomes
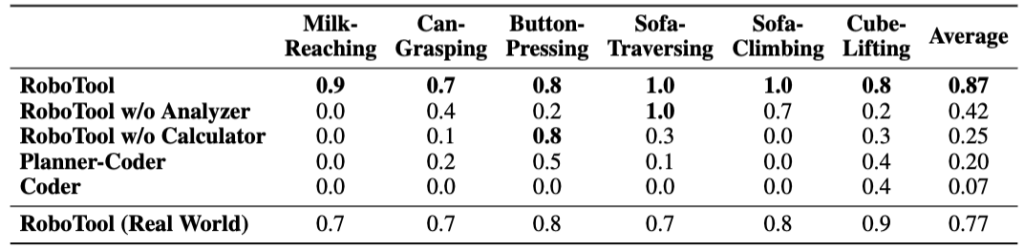
We evaluate RoboTool with 4 baselines, together with one variant of Code-as-Policies (Coder) and three variants of our proposed, together with RoboTool with out Analyzer, RoboTool with out Calculator, and Planner-Coder. Our analysis outcomes present that RoboTool persistently achieves success charges which can be both similar to or exceed these of the baselines throughout six duties in simulation. RoboTool’s efficiency in the actual world drops by 0.1 compared to the simulation end result, primarily as a result of notion errors and execution errors related to parameterized expertise, such because the quadrupedal robotic falling down the gentle couch. Nonetheless, RoboTool (Actual World) nonetheless surpasses the simulated efficiency of all baselines.
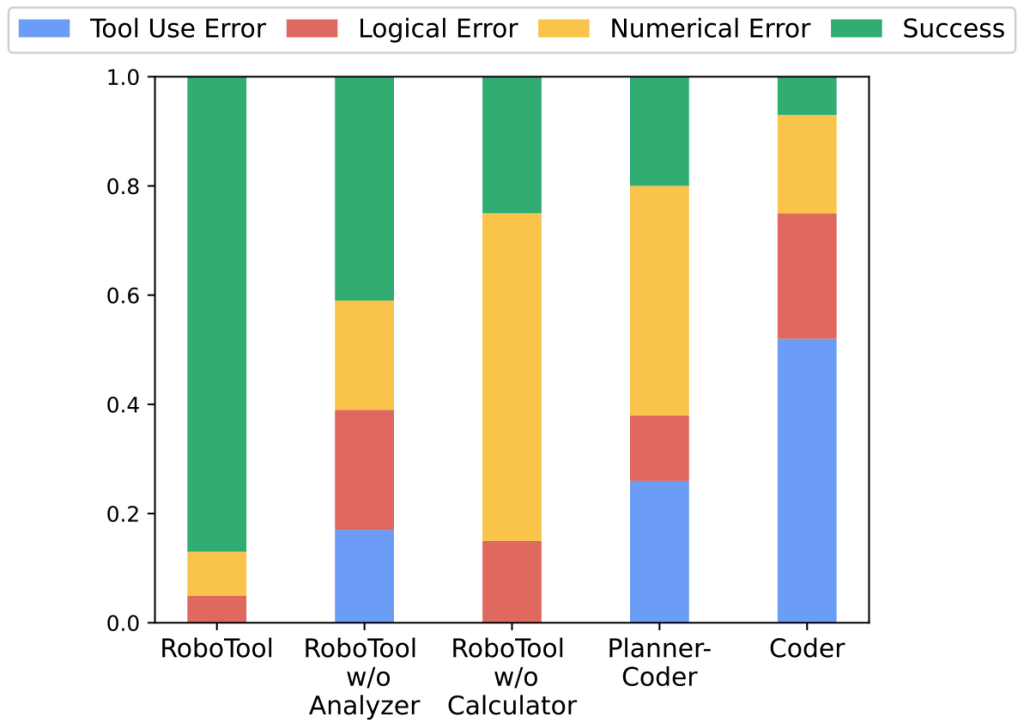
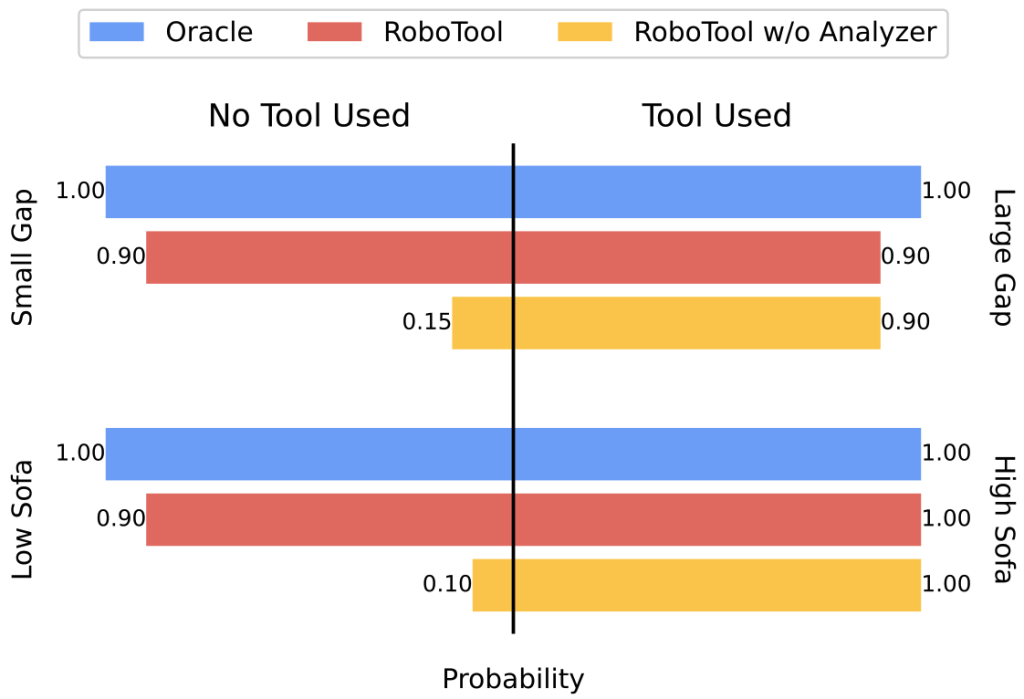
We outline three sorts of errors: tool-use error indicating whether or not the right instrument is used, logical error specializing in planning errors equivalent to utilizing instruments within the mistaken order or ignoring the offered constraints, and numerical error together with calculating the mistaken goal positions or including incorrect offsets. By evaluating RoboTool and RoboTool w/o Analyzer, we present that the Analyzer helps scale back the tool-use error. Furthermore, the Calculator considerably reduces the numerical error.
By discerning the essential idea, RoboTool allows discriminative tool-use behaviors — utilizing instruments solely when obligatory — displaying extra correct grounding associated to the atmosphere and embodiment as a substitute of being purely dominated by the prior data within the LLMs.
Takeaways
- Our proposed RoboTool can clear up long-horizon hybrid discrete-continuous planning issues with the environment- and embodiment-related constraints in a zero-shot method.
- We offer an analysis benchmark to check varied features of artistic tool-use functionality, together with instrument choice, sequential instrument use, and power manufacturing.
Paper: https://arxiv.org/pdf/2310.13065.pdf
Web site: https://creative-robotool.github.io/
Twitter: https://x.com/mengdibellaxu/status/1716447045052215423?s=20