Imaginative and prescient Transformer with BatchNorm | by Anindya Dey, PhD | Nov, 2024
How integrating BatchNorm in a typical Imaginative and prescient transformer structure results in quicker convergence and a extra steady community

Introduction
The Vision Transformer (ViT) is the primary purely self-attention-based structure for picture classification duties. Whereas ViTs do carry out higher than the CNN-based architectures, they require pre-training over very giant datasets. In an try to search for modifications of the ViT which can result in quicker coaching and inference — particularly within the context of medium-to-small enter knowledge sizes — I started exploring in a previous article ViT-type fashions which combine Batch Normalization (BatchNorm) of their structure. BatchNorm is understood to make a deep neural community converge quicker — a community with BatchNorm achieves greater accuracy in comparison with the base-line mannequin when skilled over the identical variety of epochs. This in flip accelerates coaching. BatchNorm additionally acts as an environment friendly regularizer for the community, and permits a mannequin to be skilled with the next studying fee. The principle objective of this text is to research whether or not introducing BatchNorm can result in related results in a Imaginative and prescient Transformer.
For the sake of concreteness, I’ll deal with a mannequin the place a BatchNorm layer is launched within the Feedforward Community (FFN) throughout the transformer encoder of the ViT, and the LayerNorm previous the FFN is omitted. In all places else within the transformer — together with the self-attention module — one continues to make use of LayerNorm. I’ll consult with this model of ViT as ViTBNFFN — Imaginative and prescient Transformer with BatchNorm within the Feedforward Community. I’ll prepare and check this mannequin on the MNIST dataset with picture augmentations and examine the High-1 accuracy of the mannequin with that of the usual ViT over numerous epochs. I’ll select an identical architectural configuration for the 2 fashions (i.e. an identical width, depth, patch measurement and so forth) in order that one can successfully isolate the impact of the BatchNorm layer.
Right here’s a fast abstract of the principle findings:
- For an affordable alternative of hyperparameters (studying fee and batch measurement), ViTBNFFN does converge quicker than ViT, offered the transformer depth (i.e variety of layers within the encoder) is sufficiently giant.
- As one will increase the training fee, ViTBNFFN seems to be extra steady than ViT, particularly at bigger depths.
I’ll open with a short dialogue on BatchNorm in a deep neural community, illustrating among the properties talked about above utilizing a concrete instance. I’ll then talk about intimately the structure of the mannequin ViTBNFFN. Lastly, I’ll take a deep dive into the numerical experiments that research the consequences of BatchNorm within the Imaginative and prescient Transformer.
The Dataset : MNIST with Picture Augmentation
Allow us to start by introducing the augmented MNIST dataset which I’ll use for all of the numerical experiments described on this article. The coaching and check datasets are given by the operate get_datasets_mnist() as proven in Code Block 1.
The vital strains of code are given in strains 5–10, which listing the small print of the picture augmentations I’ll use. I’ve launched three totally different transformations:
- RandomRotation(levels=20) : A random rotation of the picture with the vary of rotation in levels being (-20, 20).
- RandomAffine(levels = 0, translate = (0.2, 0.2)) : A random affine transformation, the place the specification translate = (a, b) implies that the horizontal and vertical shifts are sampled randomly within the intervals [- image_width × a, image_width × a] and [-image_height × b, image_height × b] respectively. The levels=0 assertion deactivates rotation since we have now already taken it into consideration through random rotation. One also can embody a scale transformation right here however we implement it utilizing the zoom out operation.
- RandomZoomOut(0,(2.0, 3.0), p=0.2) : A random zoom out transformation, which randomly samples the interval (2.0, 3.0) for a float r and outputs a picture with output_width = input_width × r and output_height = input_height × r. The float p is the chance that the zoom operation is carried out. This transformation is adopted by a Resize transformation in order that the ultimate picture is once more 28 × 28.
Batch Normalization in a Deep Neural Community
Allow us to give a fast overview of how BatchNorm improves the efficiency of a deep neural community. Suppose zᵃᵢ denotes the enter for a given layer of a deep neural community, the place a is the batch index which runs from a=1,…, Nₛ and that i is the characteristic index operating from i=1,…, C. The BatchNorm operation then includes the next steps:
- For a given characteristic index i, one first computes the imply and the variance over the batch of measurement Nₛ i.e.

2. One normalizes the enter utilizing the imply and variance computed above (with ϵ being a small constructive quantity):

3. Lastly, one shifts and rescales the normalized enter for each characteristic i:

the place there isn’t a summation over the index i, and the parameters (γᵢ, βᵢ) are trainable.
Take into account a deep neural community for classifying the MNIST dataset. I’ll select a community consisting of three fully-connected hidden layers, with 100 activations every, the place every hidden layer is endowed with a sigmoid activation operate. The final hidden layer feeds right into a classification layer with 10 activations comparable to the ten lessons of the MNIST dataset. The enter to this neural community is a Second-tensor of form b × 28² — the place b is the batch measurement and every 28 × 28 MNIST picture is reshaped right into a 28²-dimensional vector. On this case, the characteristic index runs from i=1, …, 28².
This mannequin is just like the one mentioned within the authentic BatchNorm paper — I’ll consult with this mannequin as DNN_d3. One might think about a model of this mannequin the place one provides a BatchNorm layer earlier than the sigmoid activation operate in every hidden layer. Allow us to name the resultant mannequin DNNBN_d3. The concept is to grasp how the introduction of the BatchNorm layer impacts the efficiency of the community.
To do that, allow us to now prepare and check the 2 fashions on the MNIST dataset described above, with CrossEntropyLoss() because the loss operate and the Adam optimizer, for 15 epochs. For a studying fee lr=0.01 and a coaching batch measurement of 100 (we select a check batch measurement of 5000), the check accuracy and the coaching loss for the fashions are given in Determine 1.

Evidently, the introduction of BatchNorm makes the community converge quicker — DNNBN achieves the next check accuracy and decrease coaching loss. BatchNorm can due to this fact velocity up coaching.
What occurs if one will increase the training fee? Typically talking, a excessive studying fee may result in gradients blowing up or vanishing, which might render the coaching unstable. Particularly, bigger studying charges will result in bigger layer parameters which in flip give bigger gradients throughout backpropagation. BatchNorm, nevertheless, ensures that the backpropagation by means of a layer isn’t affected by a scaling transformation of the layer parameters (see Part 3.3 of this paper for extra particulars). This makes the community considerably extra immune to instabilities arising out of a excessive studying fee.
To exhibit this explicitly for the fashions at hand, allow us to prepare them at a a lot greater studying fee lr=0.1 — the check accuracy and the coaching losses for the fashions on this case are given in Determine 2.

The excessive studying fee manifestly renders the DNN unstable. The mannequin with BatchNorm, nevertheless, is completely well-behaved! A extra instructive solution to visualize this conduct is to plot the accuracy curves for the 2 studying charges in a single graph, as proven in Determine 3.

Whereas the mannequin DNN_d3 stops coaching on the excessive studying fee, the affect on the efficiency of DNNBN_d3 is considerably milder. BatchNorm due to this fact permits one to coach a mannequin at the next studying fee, offering one more solution to velocity up coaching.
The Mannequin ViTBNFFN : BatchNorm within the FeedForward Community
Allow us to start by briefly reviewing the structure of the usual Imaginative and prescient Transformer for picture classification duties, as proven within the schematic diagram of Determine 4. For extra particulars, I refer the reader to my earlier article or one of many many glorious evaluations of the subject in In direction of Information Science.

Functionally, the structure of the Imaginative and prescient Transformer could also be divided into three most important parts:
- Embedding layer : This layer maps a picture to a “sentence” — a sequence of tokens, the place every token is a vector of dimension dₑ (the embedding dimension). Given a picture of measurement h × w and c colour channels, one first splits it into patches of measurement p × p and flattens them — this offers (h × w)/p² flattened patches (or tokens) of dimension dₚ = p² × c, that are then mapped to vectors of dimension dₑ utilizing a learnable linear transformation. To this sequence of tokens, one provides a learnable token — the CLS token — which is remoted on the finish for the classification activity. Schematically, one has:

Lastly, to this sequence of tokens, one provides a learnable tensor of the identical form which encodes the positional embedding info. The resultant sequence of tokens is fed into the transformer encoder. The enter to the encoder is due to this fact a 3d tensor of form b × N × dₑ — the place b is the batch measurement, N is the variety of tokens together with the CLS token, and dₑ is the embedding dimension.
2. Transformer encoder : The transformer encoder maps the sequence of tokens to a different sequence of tokens with the identical quantity and the identical form. In different phrases, it maps the enter 3d tensor of form b × N × dₑ to a different 3d tensor of the identical form. The encoder can have L distinct layers (outlined because the depth of the transformer) the place every layer is made up of two sub-modules as proven in Determine 5— the multi-headed self-attention (MHSA) and the FeedForward Community (FFN).

The MHSA module implements a non-linear map on the 3d tensor of form b × N × dₑ to a 3d tensor of the identical form which is then fed into the FFN as proven in Determine 2. That is the place info from totally different tokens get blended through the self-attention map. The configuration of the MHSA module is mounted by the variety of heads nₕ and the top dimension dₕ.
The FFN is a deep neural community with two linear layers and a GELU activation within the center as proven in Determine 6.

The enter to this sub-module is a 3d tensor of of form b × N × dₑ. The linear layer on the left transforms it to a 3d tensor of form b × N × d_mlp, the place d_mlp is the hidden dimension of the community. Following the non-linear GELU activation, the tensor is mapped to a tensor of the unique form by the second layer.
3. MLP Head : The MLP Head is a fully-connected community that maps the output of the transformer encoder — 3d tensor of form b × N × dₑ — to a Second tensor of form b × d_num the place d_num is the variety of lessons within the given picture classification activity. That is executed by first isolating the CLS token from the enter tensor after which placing it by means of the related community.
The mannequin ViTBNFFN has the identical structure as described above with two variations. Firstly, one introduces a BatchNorm Layer within the FFN of the encoder between the primary linear layer and the GELU activation as proven in Determine 7. Secondly, one removes the LayerNorm previous the FFN in the usual ViT encoder (see Determine 5 above).

Because the linear transformation acts on the third dimension of the enter tensor of form b × N × dₑ , we must always determine dₑ because the characteristic dimension of the BatchNorm. The PyTorch implementation of the brand new feedforward community is given in Code Block 2.
The built-in BatchNorm class in PyTorch all the time takes the primary index of a tensor because the batch index and the second index because the characteristic index. Subsequently, one wants to rework our 3d tensor with form b × N × dₑ to a tensor of form b × dₑ × N earlier than making use of BatchNorm, and remodeling it again to b × N × dₑ afterwards. As well as, I’ve used the Second BatchNorm class (since it’s barely quicker than the 1d BatchNorm). This requires selling the 3d tensor to a 4d tensor of form b × dₑ × N × 1 (line 16) and remodeling it again (line 18) to a 3d tensor of form b × N × dₑ. One can use the 1d BatchNorm class with out altering any of the outcomes offered within the part.
The Experiment
With a hard and fast studying fee and batch measurement, I’ll prepare and check the 2 fashions — ViT and ViTBNFFN — on the augmented MNIST dataset for 10 epochs and examine the High-1 accuracies on the validation dataset. Since we’re thinking about understanding the consequences of BatchNorm, we must examine the 2 fashions with an identical configurations. The experiment will probably be repeated at totally different depths of the transformer encoder maintaining the remainder of the mannequin configuration unchanged. The precise configuration for the 2 fashions that I exploit on this experiment is given as follows :
- Embedding layer: An MNIST picture is a grey-scale picture of measurement 28× 28. The patch measurement is p= 7, which means that the variety of tokens is 16 + 1 =17 together with the CLS token. The embedding dimension is dₑ = 64.
- Transformer encoder: The MHSA submodule has nₕ = 8 heads with head dimension dₕ=64. The hidden dimension of the FFN is d_mlp = 128. The depth of the encoder would be the solely variable parameter on this structure.
- MLP head: The MLP head will merely include a linear layer.
The coaching and testing batch sizes will probably be mounted at 100 and 5000 respectively for all of the epochs, with CrossEntropyLoss() because the loss operate and Adam optimizer. The dropout parameters are set to zero in each the embedding layer in addition to the encoder. I’ve used the NVIDIA L4 Tensor Core GPU out there at Google Colab for all of the runs, which have been recorded utilizing the monitoring characteristic of MLFlow.
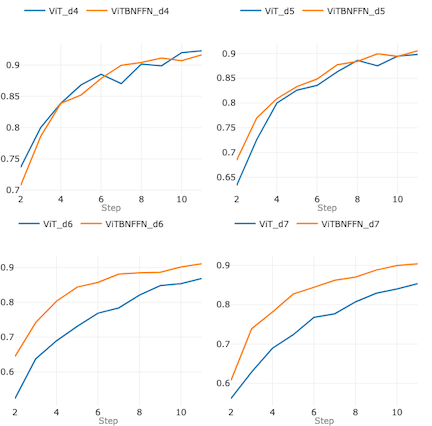
Allow us to begin by coaching and testing the fashions on the studying fee lr= 0.003. Determine 8 beneath summarizes the 4 graphs which plot the accuracy curves of the 2 fashions at depths d=4, 5, 6 and seven respectively. In these graphs, the notation ViT_dn (ViTBNFFN_dn) denotes ViT (ViTBNFFN) with depth of the encoder d=n and the remainder of the mannequin configuration being the identical as specified above.

For d= 4 and d= 5 (the highest row of graphs), the accuracies of the 2 fashions are comparable — for d=4 (prime left) ViT does considerably higher, whereas for d=5 (prime proper) ViTBNFFN surpasses ViT marginally. For d < 4, the accuracies stay comparable. Nevertheless, for d=6 and d=7 (the underside row of graphs), ViTBNFFN does considerably higher than ViT. One can test that this qualitative characteristic stays the identical for any depth d ≥ 6.
Allow us to repeat the experiment at a barely greater studying fee lr = 0.005. The accuracy curves of the 2 fashions at depths d=1, 2, 3 and 4 respectively are summarized in Determine 9.

For d= 1 and d= 2 (the highest row of graphs), the accuracies of the 2 fashions are comparable — for d=1 ViT does considerably higher, whereas for d=2 they’re nearly indistinguishable. For d=3 (backside left), ViTBNFFN achieves a barely greater accuracy than ViT. For d=4 (backside proper), nevertheless, ViTBNFFN does considerably higher than ViT and this qualitative characteristic stays the identical for any depth d ≥ 4.
Subsequently, for an affordable alternative of studying fee and batch measurement, ViTBNFFN converges considerably quicker than ViT past a essential depth of the transformer encoder. For the vary of hyperparameters I think about, it appears that evidently this essential depth will get smaller with rising studying fee at a hard and fast batch measurement.
For the deep neural community instance, we noticed that the affect of a excessive studying fee is considerably milder on the community with BatchNorm. Is there one thing analogous that occurs for a Imaginative and prescient Transformer? That is addressed in Determine 10. Right here every graph plots the accuracy curves of a given mannequin at a given depth for 2 totally different studying charges lr=0.003 and lr=0.005. The primary column of graphs corresponds to ViT for d=2, 3 and 4 (prime to backside) whereas the second column corresponds to ViTBNFFN for a similar depths.

Take into account d=2 — given by the highest row of graphs — ViT and ViTBNFFN are comparably impacted as one will increase the training fee. For d = 3 — given by the second row of graphs — the distinction is critical. ViT achieves a a lot decrease accuracy on the greater studying fee — the accuracy drops from about 91% to round 78% on the finish of epoch 10. Alternatively, for ViTBNFFN, the accuracy on the finish of epoch 10 drops from about 92% to about 90%. This qualitative characteristic stays the identical at greater depths too — see the underside row of graphs which corresponds to d=4. Subsequently, the affect of the upper studying fee on ViTBNFFN appears to be like considerably milder for sufficiently giant depth of the transformer encoder.
Conclusion
On this article, I’ve studied the consequences of introducing a BatchNorm layer contained in the FeedForward Community of the transformer encoder in a Imaginative and prescient Transformer. Evaluating the fashions on an augmented MNIST dataset, there are two most important classes that one might draw. Firstly, for a transformer of ample depth and for an affordable alternative of hyperparameters, the mannequin with BatchNorm achieves considerably greater accuracy in comparison with the usual ViT. This quicker convergence can tremendously velocity up coaching. Secondly, just like our instinct for deep neural networks, the Imaginative and prescient Transformer with BatchNorm is extra resilient to the next studying fee, if the encoder is sufficiently deep.