Navigating to Objects within the Actual World – Machine Studying Weblog | ML@CMU
Empirical examine: We evaluated three approaches for robots to navigate to things in six visually various houses.
TLDR: Semantic navigation is important to deploy cell robots in uncontrolled environments like our houses, faculties, and hospitals. Many learning-based approaches have been proposed in response to the shortage of semantic understanding of the classical pipeline for spatial navigation. However discovered visible navigation insurance policies have predominantly been evaluated in simulation. How properly do totally different courses of strategies work on a robotic? We current a large-scale empirical examine of semantic visible navigation strategies evaluating consultant strategies from classical, modular, and end-to-end studying approaches. We consider insurance policies throughout six houses with no prior expertise, maps, or instrumentation. We discover that modular studying works properly in the actual world, attaining a 90% success charge. In distinction, end-to-end studying doesn’t, dropping from 77% simulation to 23% real-world success charge as a result of a big picture area hole between simulation and actuality. For practitioners, we present that modular studying is a dependable strategy to navigate to things: modularity and abstraction in coverage design allow Sim-to-Actual switch. For researchers, we establish two key points that forestall at present’s simulators from being dependable analysis benchmarks — (A) a big Sim-to-Actual hole in photos and (B) a disconnect between simulation and real-world error modes.
Object Purpose Navigation
We instantiate semantic navigation with the Object Purpose navigation process [Anderson 2018], the place a robotic begins in a totally unseen surroundings and is requested to seek out an occasion of an object class, let’s say a bathroom. The robotic has entry to solely a first-person RGB and depth digicam and a pose sensor (computed with LiDAR-based SLAM).
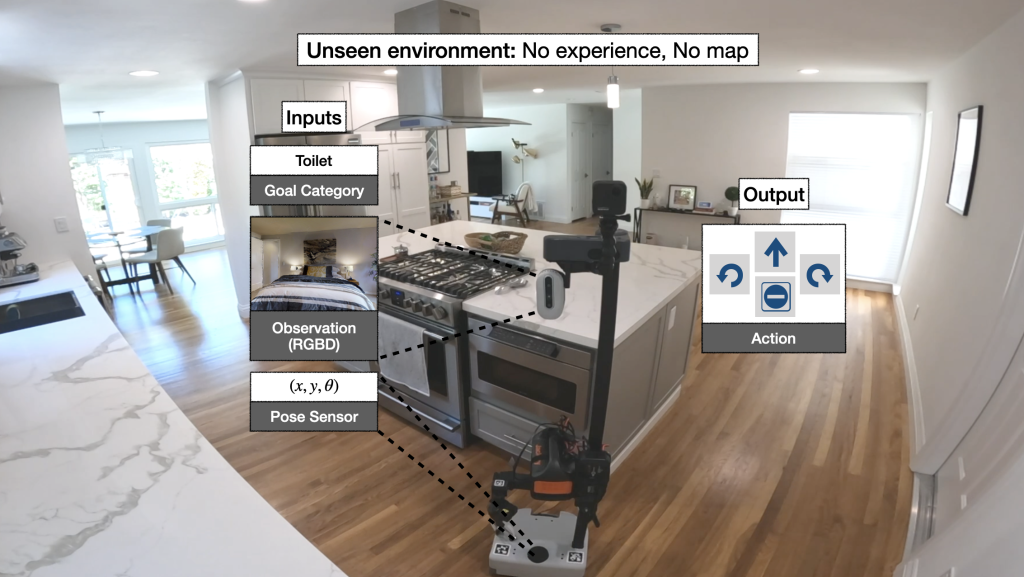
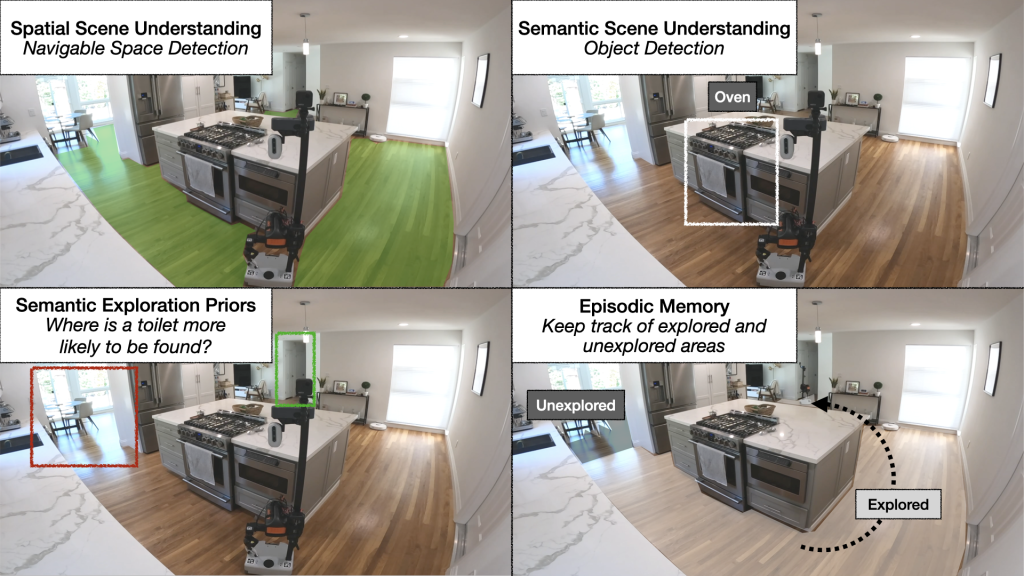
This process is difficult. It requires not solely spatial scene understanding of distinguishing free house and obstacles and semantic scene understanding of detecting objects, but additionally requires studying semantic exploration priors. For instance, if a human needs to discover a rest room on this scene, most of us would select the hallway as a result of it’s most certainly to result in a bathroom. Educating this sort of spatial widespread sense or semantic priors to an autonomous agent is difficult. Whereas exploring the scene for the specified object, the robotic additionally wants to recollect explored and unexplored areas.
Strategies
So how will we prepare autonomous brokers able to environment friendly navigation whereas tackling all these challenges? A classical strategy to this downside builds a geometrical map utilizing depth sensors, explores the surroundings with a heuristic, like frontier exploration [Yamauchi 1997], which explores the closest unexplored area, and makes use of an analytical planner to achieve exploration objectives and the purpose object as quickly as it’s in sight. An end-to-end studying strategy predicts actions straight from uncooked observations with a deep neural community consisting of visible encoders for picture frames adopted by a recurrent layer for reminiscence [Ramrakhya 2022]. A modular studying strategy builds a semantic map by projecting predicted semantic segmentation utilizing depth, predicts an exploration purpose with a goal-oriented semantic coverage as a operate of the semantic map and the purpose object, and reaches it with a planner [Chaplot 2020].
Massive-scale Actual-world Empirical Analysis
Whereas many approaches to navigate to things have been proposed over the previous few years, discovered navigation insurance policies have predominantly been evaluated in simulation, which opens the sector to the chance of sim-only analysis that doesn’t generalize to the actual world. We handle this challenge by way of a large-scale empirical analysis of consultant classical, end-to-end studying, and modular studying approaches throughout 6 unseen houses and 6 purpose object classes (chair, sofa, plant, rest room, TV).

Outcomes
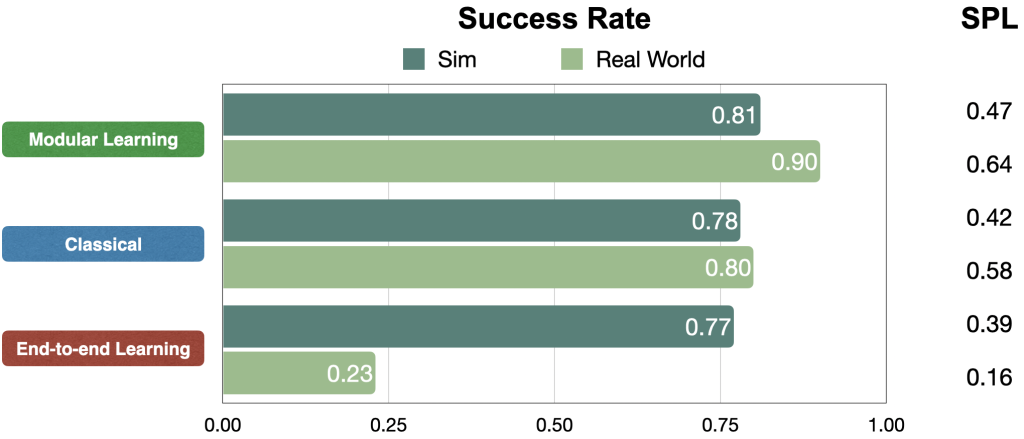
We examine approaches by way of success charge inside a restricted price range of 200 robotic actions and Success weighted by Path Size (SPL), a measure of path effectivity. In simulation, all approaches carry out comparably. However in the actual world, modular studying and classical approaches switch rather well whereas end-to-end studying fails to switch.
We illustrate these outcomes qualitatively with one consultant trajectory.
Outcome 1: Modular Studying is Dependable
We discover that modular studying may be very dependable on a robotic, with a 90% success charge.
Outcome 2: Modular Studying Explores extra Effectively than the Classical Strategy
Modular studying improves by 10% real-world success charge over the classical strategy. With a restricted time price range, inefficient exploration can result in failure.
Outcome 3: Finish-to-end Studying Fails to Switch
Whereas classical and modular studying approaches work properly on a robotic, end-to-end studying doesn’t, at solely 23% success charge.

Evaluation
Perception 1: Why does Modular Switch whereas Finish-to-end doesn’t?
Why does modular studying switch so properly whereas end-to-end studying doesn’t? To reply this query, we reconstructed one real-world house in simulation and carried out experiments with similar episodes in sim and actuality.

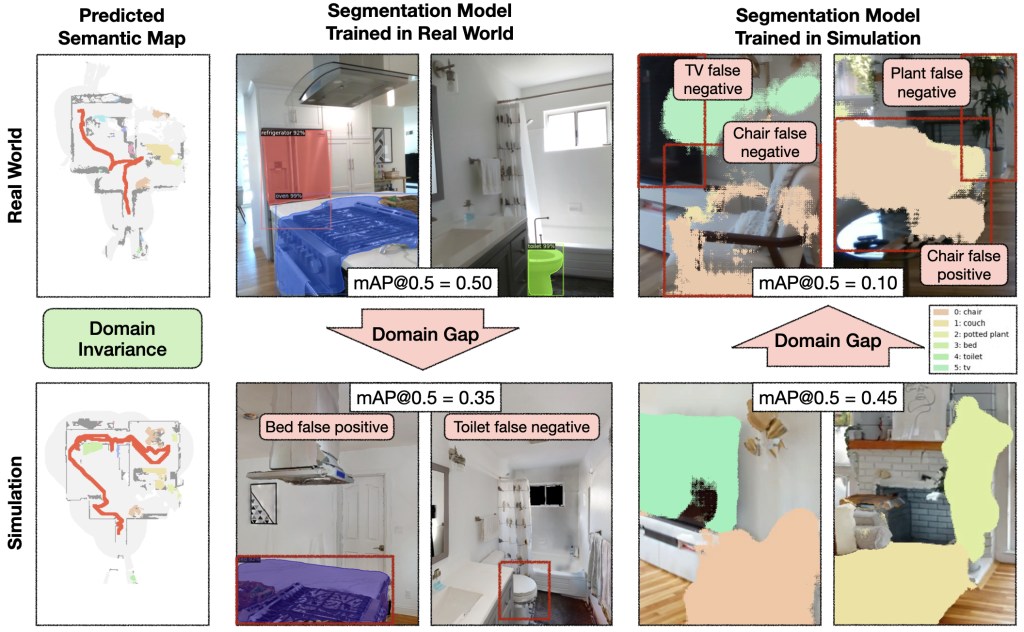
The semantic exploration coverage of the modular studying strategy takes a semantic map as enter, whereas the end-to-end coverage straight operates on the RGB-D frames. The semantic map house is invariant between sim and actuality, whereas the picture house reveals a big area hole.
The semantic map area invariance permits the modular studying strategy to switch properly from sim to actuality. In distinction, the picture area hole causes a big drop in efficiency when transferring a segmentation mannequin educated in the actual world to simulation and vice versa. If semantic segmentation transfers poorly from sim to actuality, it’s affordable to anticipate an end-to-end semantic navigation coverage educated on sim photos to switch poorly to real-world photos.
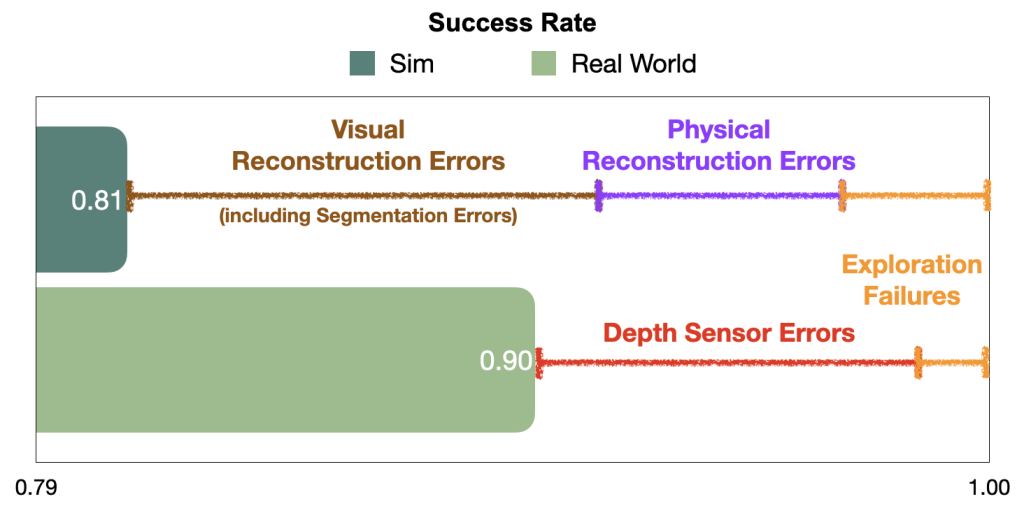
Perception 2: Sim vs Actual Hole in Error Modes for Modular Studying
Surprisingly, modular studying works even higher in actuality than simulation. Detailed evaluation reveals that loads of the failures of the modular studying coverage that happen in sim are as a result of reconstruction errors, each visible and bodily, which don’t occur in actuality. In distinction, failures in the actual world are predominantly as a result of depth sensor errors, whereas most semantic navigation benchmarks in simulation assume excellent depth sensing. Apart from explaining the efficiency hole between sim and actuality for modular studying, this hole in error modes is regarding as a result of it limits the usefulness of simulation to diagnose bottlenecks and additional enhance insurance policies. We present consultant examples of every error mode and suggest concrete steps ahead to shut this hole within the paper.
Takeaways
For practitioners:
- Modular studying can reliably navigate to things with 90% success
For researchers:
- Fashions counting on RGB photos are arduous to switch from sim to actual => leverage modularity and abstraction in insurance policies
- Disconnect between sim and actual error modes => consider semantic navigation on actual robots
For those who’ve loved this put up and wish to be taught extra, please try the Science Robotics 2023 paper and talk. Code coming quickly. Additionally, please don’t hesitate to achieve out to Theophile Gervet!




